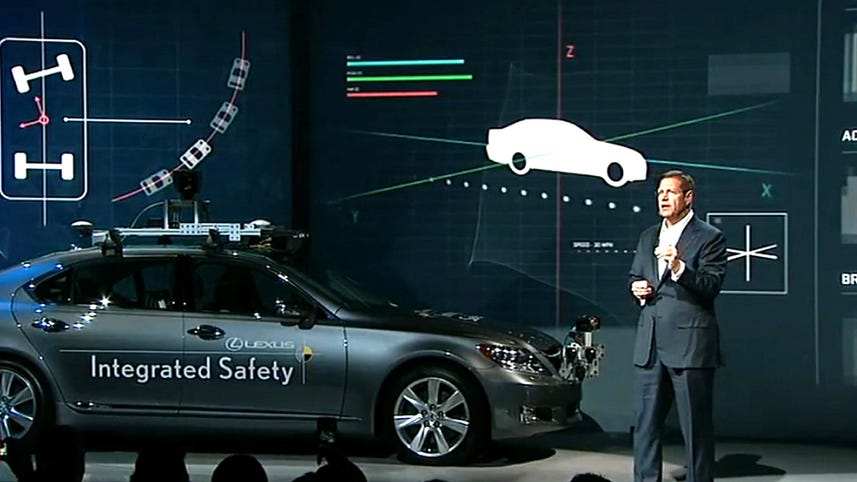
Lexus outlines its vision for the car of the future
Tech Industry
-In fact, our safety strategy has five critical components.
They include the initial time the driver and car begin their journey from a parked position, to active safety systems designed to avoid the crash, to pre-collision features aimed to preparing for a collision, to passive safety technologies to help survive a crash, to rescue in response
systems after a crash has occurred.
We call it our integrated safety management concept.
A key component of this approach focuses on high-level drive resist technologies that may at some point in the feature evolve into a fully autonomous car.
The 2013 LS with the world's most advanced pre-collision system uses a combination of millimeter wave radar, a stereo camera, a near infra-red projectors.
Our system is designed to
assist the driver in avoiding or mitigating collisions with vehicles and pedestrians under a wide range of speeds day or night.
Now, based on the positions, speed and trajectory of an object, if the system anticipates the collision, you'll hear a warning sound and a brake alert will be illuminated on the instrument panel.
At the same time, several integrated systems automatically activate to increase steering quickness, suspension control and brake effectiveness.
The shocks are stiffen to help control nose dive and increased steering responsiveness.
And the automatic seatbelt pre-tensioners are activated.
Our system even applies the brakes automatically to reduce impact speed.
The 2013 LS is graphic evidence of how automated technologies have advanced in the last decade.
So, what paths must be explored in the future?
We believe there are 2 that seem most compelling.
A few months ago, TMC begin full-scale operations at its ITS proving ground at the Higashi-Fuji Technical Center in Japan.
The facility which stimulates an urban environment has a communication system that links road to vehicle, vehicle to vehicle, pedestrian to vehicle, traffic signals and controlled devices while monitoring the entire course.
The research conducted at our proving grounds will help prevent accidents involving pedestrians and other vehicles.
Improve
poor visibility at intersections and much, much more.
Through it all, Toyota Motor Corporation is dedicated to collaborating with government regulators and cooperating with ITS' governing boards to help advance future mobility.
Now, whereas ITS is focused on integrating the car with the driving environment, our advanced safety research vehicle is aimed at enhancing the car and the driver's ability to perceive, process and respond
with the aid of on-board automated technologies.
We believe our approach is unique and that involves 2 parallel programs half a world apart exploring different technologies to achieve one common goal.
Now, one of these active safety research programs is based in Japan, the other in Ann Arbor Michigan at the Toyota Research Institute North America known as TRINA.
The TRINA program is aimed purely at research.
The Japan engineering group adds the element of exploring
future product development for market integration.
Now, this LS Hybrid is just one example of the areas we're exploring at TRINA.
It's fitted with advanced GPS, forward and side facing radars and high-def colored cameras, 360 degree laser tracking, driver's scope, accelerometer among many of its other sensor components.
Our goal is the system that constantly perceives processes and response to its
surroundings that scans the movement of objects around it identifies the green light from a red light and measures the trajectory, roll, pitch and [unk] the vehicle as it steers, accelerates and brakes along the most efficient route to its programmed destination.
And array of equipment processes data, formulates decision in an x by wire responses.
Now as you can imagine we can't discuss specific performance perimeters, and we can't speculate today on how or when such a
car might be available in the market place.
Our guess is not in the immediate future.
And that's how it should be.
At the moment, this is a pure research project with a strong statement of the shape of things to come.
Sensor and by-wire technologies have opened the door for machines to recognize and respond to the environment around them.
Beyond even the capabilities of humans.
However, sensing what surround you versus understanding it is vastly different.
So we must combine the judgment of humans with the precision of machines and that takes time.
Right now, machines can handle simple task like parking, following traffic and standing in the lane.
But we need to introduce our layered approach that will broaden capabilities.
Step-by-step, we will build trust with society and governance so that vehicles will be allowed to perform more automated tasks.
These capabilities must be integrated with consistency
and reliability before vehicles are trusted to drive alone.