
Up Next
Trash Gobbling Robots Cleaning Lake Tahoe and Beyond!

Up Next
Trash Gobbling Robots Cleaning Lake Tahoe and Beyond!
Nvidia's Project GR00T vs. Tesla Optimus: Competing Robot Strategies
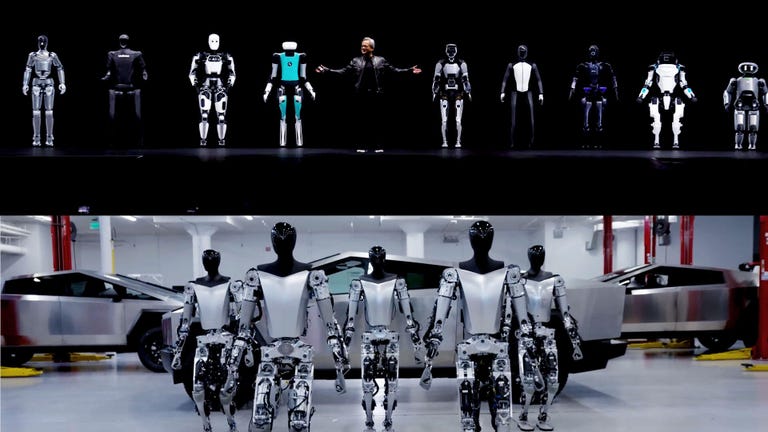
Nvidia's Project GR00T vs. Tesla Optimus: Competing Robot Strategies


Creating the World's Most Efficient Solar Electric Car

Creating the World's Most Efficient Solar Electric Car
40 Miles an Hour in an Electric Speedboat: Test-Driving the Arc One

40 Miles an Hour in an Electric Speedboat: Test-Driving the Arc One
How Mark Rober's Rivalry with Mr. Beast Led to a Nerf Gun Made of DNA
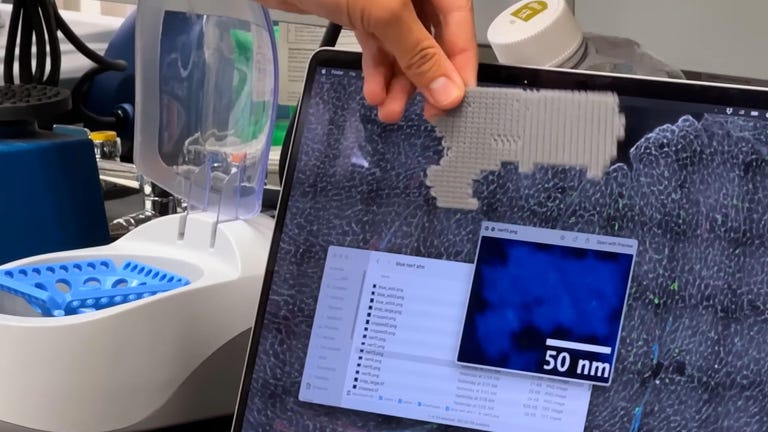
How Mark Rober's Rivalry with Mr. Beast Led to a Nerf Gun Made of DNA
Brain-Computer Interface: No Open Brain Surgery Required

Brain-Computer Interface: No Open Brain Surgery Required
Electronic Nose 'Smells' Wildfires for Ultra-Early Detection

Electronic Nose 'Smells' Wildfires for Ultra-Early Detection
First Look at the Tech Inside the $2.3B MSG Sphere

First Look at the Tech Inside the $2.3B MSG Sphere
Tech Shows





Latest News All latest news

Beats Solo 4 Headphones Review: Same Look, but Better Sound and USB-C

Beats Solo 4 Headphones Review: Same Look, but Better Sound and USB-C
Living With Samsung Galaxy S24 Ultra: 3 Months Later

Living With Samsung Galaxy S24 Ultra: 3 Months Later
Trash Gobbling Robots Cleaning Lake Tahoe and Beyond!
Trash Gobbling Robots Cleaning Lake Tahoe and Beyond!

Meta Expands Its Mixed Reality Beyond the Quest Headsets Explainer

Meta Expands Its Mixed Reality Beyond the Quest Headsets Explainer
Most Popular All most popular

Samsung Galaxy S24 Ultra Review: More AI at a Higher Cost

Samsung Galaxy S24 Ultra Review: More AI at a Higher Cost
'Circle to Search' Lets Users Google From Any Screen

'Circle to Search' Lets Users Google From Any Screen
Asus Put Two 14-inch OLEDs in a Laptop, Unleashes First OLED ROG Gaming Laptop

Asus Put Two 14-inch OLEDs in a Laptop, Unleashes First OLED ROG Gaming Laptop


Latest Products All latest products
Beats Solo 4 Headphones Review: Same Look, but Better Sound and USB-C
Beats Solo 4 Headphones Review: Same Look, but Better Sound and USB-C
Robosen's Megatron Transformer Is Too Much Fun for an Evil Robot

Robosen's Megatron Transformer Is Too Much Fun for an Evil Robot
2025 Audi Q6, SQ6 E-Tron: Audi's Newest EV Is Its Most Compelling

2025 Audi Q6, SQ6 E-Tron: Audi's Newest EV Is Its Most Compelling


Latest How To All how to videos

How to Watch the Solar Eclipse Safely From Your Phone




