[ Music ]
^M00:00:04
[ Robots ]
^M00:00:06
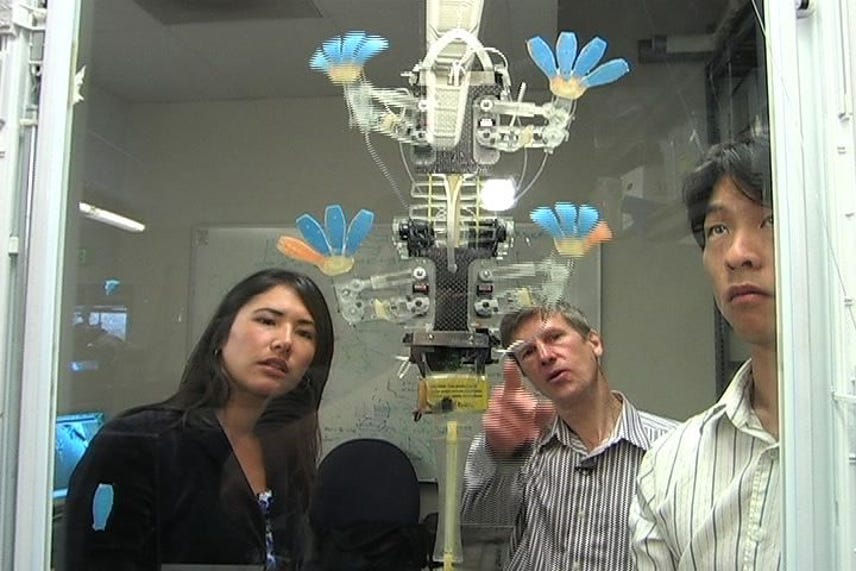
>> You see the way that it's curling the toes. The actual gecko does that also.
>> Meet Stickybot, a climbing robot from Stanford University that can trace its lineage directly to the gecko.
>> The gecko in some way has been the gold standard, you know of climbing animals that people try to emulate.
>> The reason, million of tiny hairs in the lizard's hands and feet that allow it to climb vertical surfaces.
>> Probably the most important part of the design are these blue pads that have a directional adhesive and if you put your finger on it, you see they really not -- they don't feel sticky. They're just kind of fuzzy.
>> Yeah, it's a little texture.
>> But the way they work is that if you pull downwards they stick themselves, so that's it. And then to come off you just lift it off.
>> But for the animal and the robot, the Van der Waals forces and directional adhesion work better than something truly sticky to make contact.
>> That waste energy is like walking with bubble gum on your shoe.
>> When climbing, the gecko's tail also plays a key role in providing stability. And will someday be incorporated in the Stickybot's functionality.
>> By pressing gently with the tail, it reduces the amount of pulling force that you need at the front feet.
>> So, the tail of this one is not an active tail necessary for you to...
>> No, it's just a passive tail.
>> Okay.
>> And we got it there because it does help.
>> Uh-huh.
>> But, we don't have all those reflexes that the gecko has.
>> But geckos aren't the only inspirational animal. From snakes to fish, robotics engineers are taking their cues from nature.
>> I think what's happened in the last few years is that the technology has finally evolved to the point that we, first of all can study in much more detail what's going on. We've got atomic force microscopes and we can really study the gecko in detail and also the technology has got to the point that we -- as we learn about what's going on in nature, we can start to recreate it.
>> Professor Mark Cutkosky says, one day Stickybot has all sorts of military applications: Inspections, surveillance, or environmental monitoring.
>> Those applications are still some years away I think. The first step, which we're starting to make progress with is just, just to be able to get them out of the lab into the real world.
>> And maybe not too far from now, climbing a la Spider-Man.
>> What if you could do that? Wouldn't it be fun?
>> Sign me up. I'd love to be able to climb walls, like gracefully -- or maybe in this case, Gecko-Man. I'm Kara Tsuboi, CNET News.com.
^M00:02:26
[ Music ]