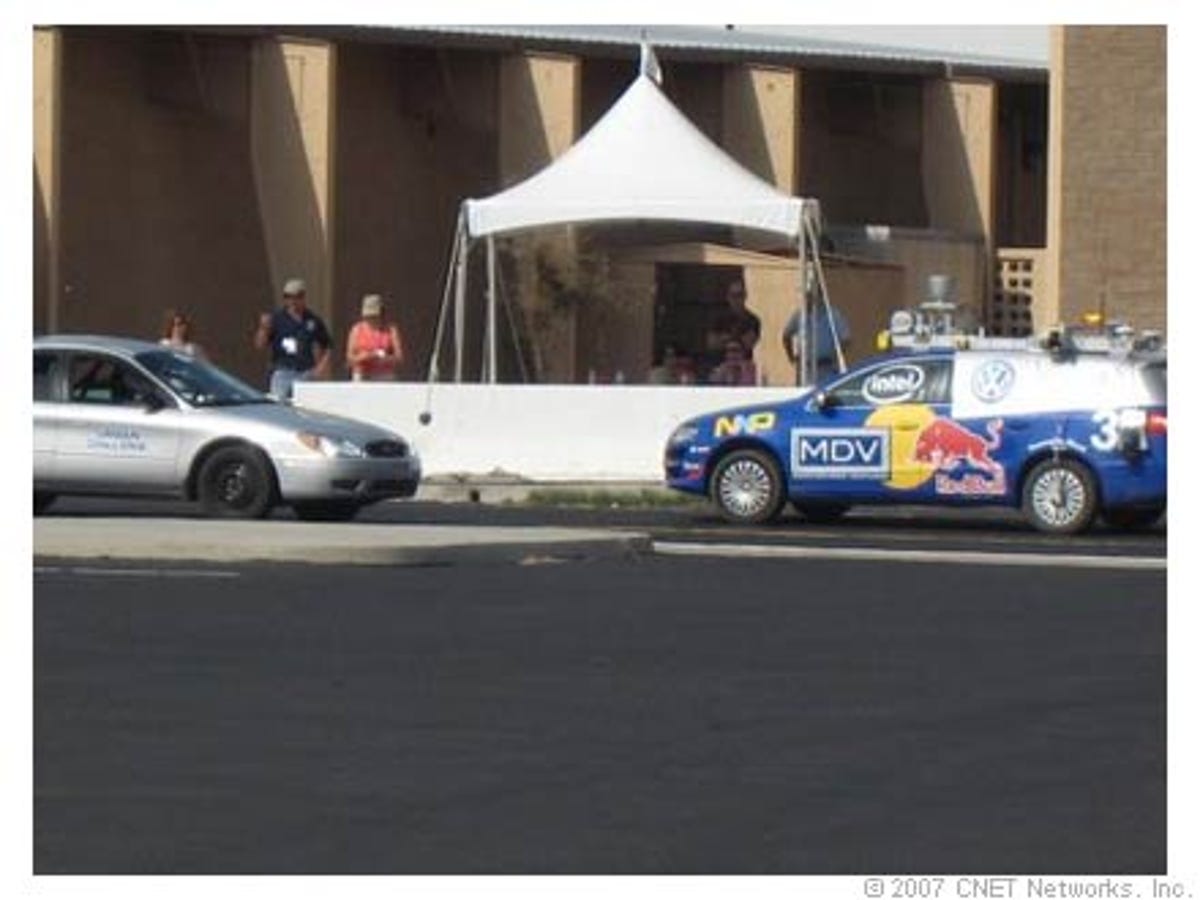
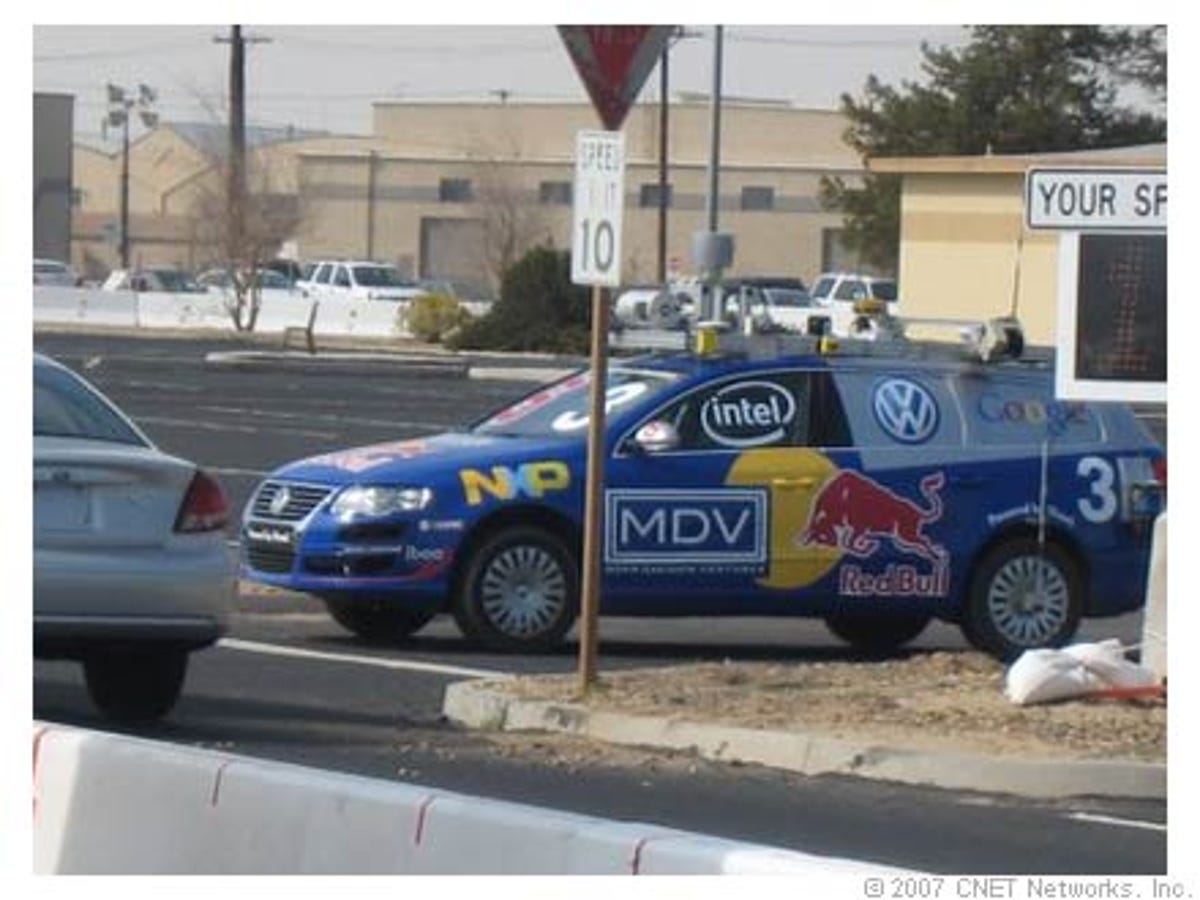
Photos: DARPA Urban Challenge NQE
This week in Victorville, California, 36 teams from around the world are participating in the National Qualifying Event for the 2007 DARPA Urban Challenge, a race between autonomous (that is, driverless) cars. According to DARPA, no more than 20 cars will take part in the final 60-mile race on Saturday, November 3. To determine who goes through, the teams are currently taking part in a 5-day qualifying event, in which their vehicles have to prove themselves in three different test areas designed to assess their abilities to pull safely into moving traffic, avoid static and moving obstacles, and park in designated spots. We got a trackside view of the robot cars testing, and looked on as a number of the teams tweaked, tested, and retested for qualifying.










More Galleries

My Favorite Shots From the Galaxy S24 Ultra's Camera
20 Photos
Honor's Magic V2 Foldable Is Lighter Than Samsung's Galaxy S24 Ultra
10 Photos
The Samsung Galaxy S24 and S24 Plus Looks Sweet in Aluminum
23 Photos
Samsung's Galaxy S24 Ultra Now Has a Titanium Design
23 Photos
I Took 600+ Photos With the iPhone 15 Pro and Pro Max. Look at My Favorites
34 Photos
