The evolution of humanoid robots (pictures)
With advances in sensors and control systems, humanoid robots, like DARPA's Atlas, are soon to be working side by side with us in everything from industry to entertainment.


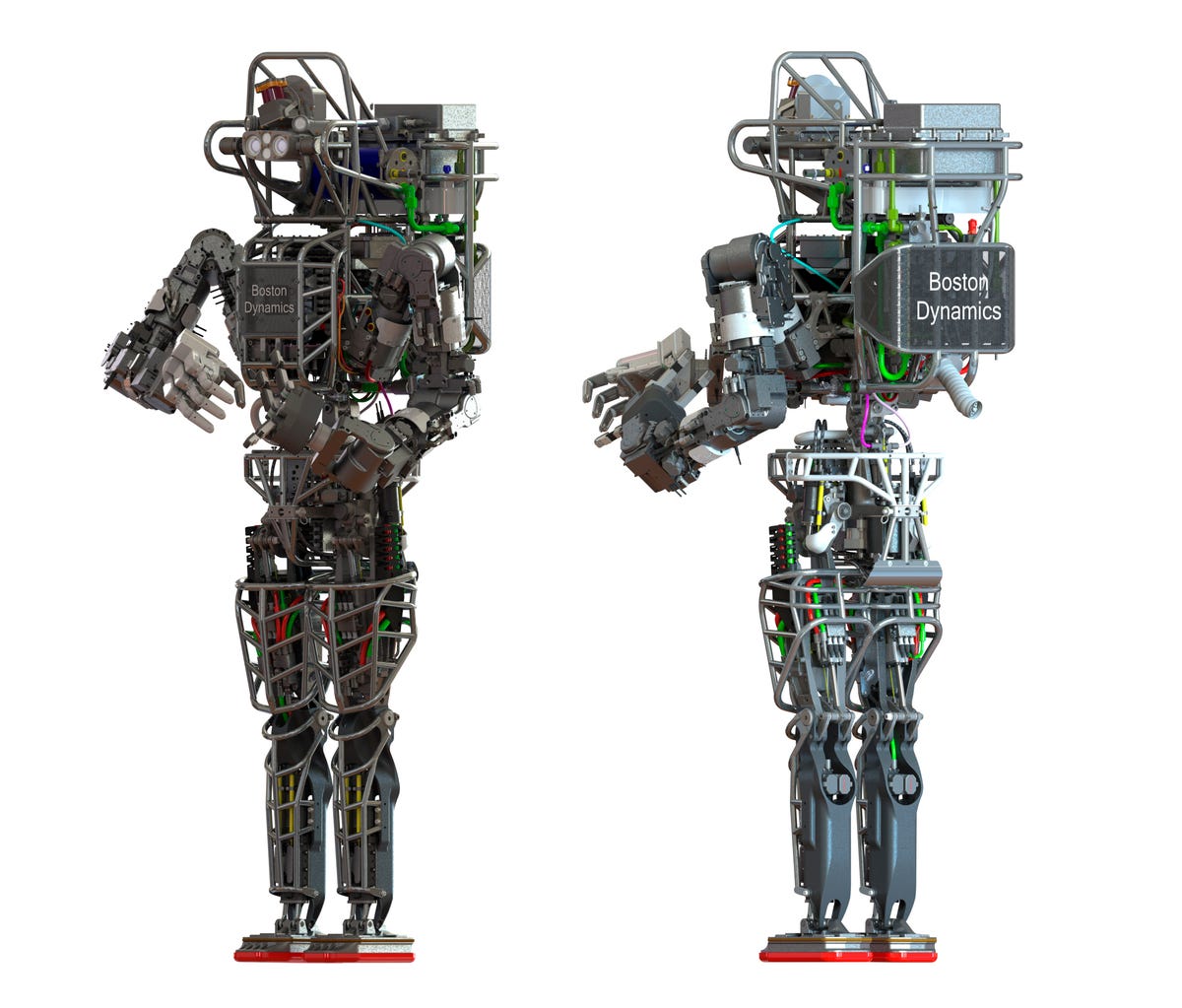
DARPA's Atlas
Atlas, with 28 hydraulically actuated joints, is one of the most advanced humanoid robots ever built. But the humanoid is essentially a physical shell, a starting point for the software brains and nerves that the teams from DARPA’s Virtual Robotics Challenge will use as a development platform.
We're not yet in danger from these bipedal bots, but better sensors, muscle-like actuators, and more advanced planning and control systems are making robots more and more like us everyday.
After more than 30 years of robotics development, we are soon sure to see the machines walking among us.
Take a look at the evolution of robotics development.
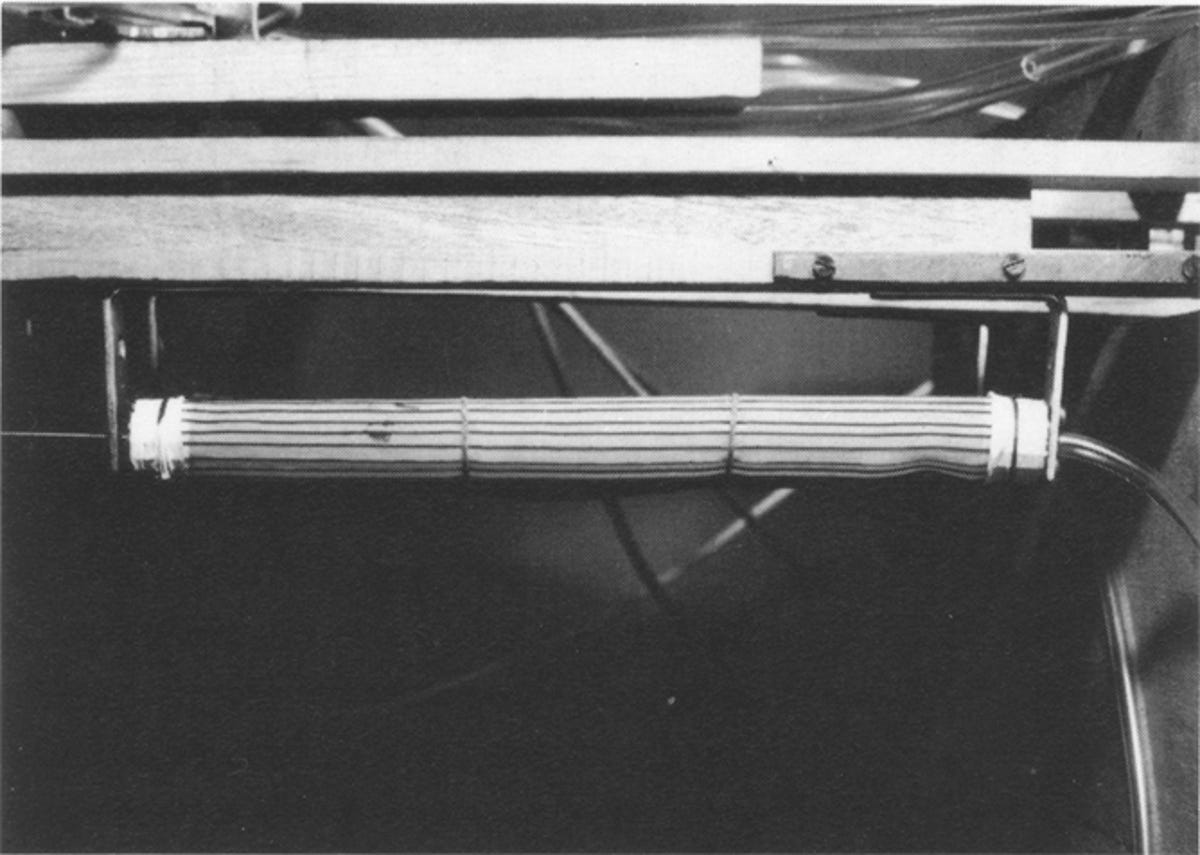
Rubber artificial muscle, 1967
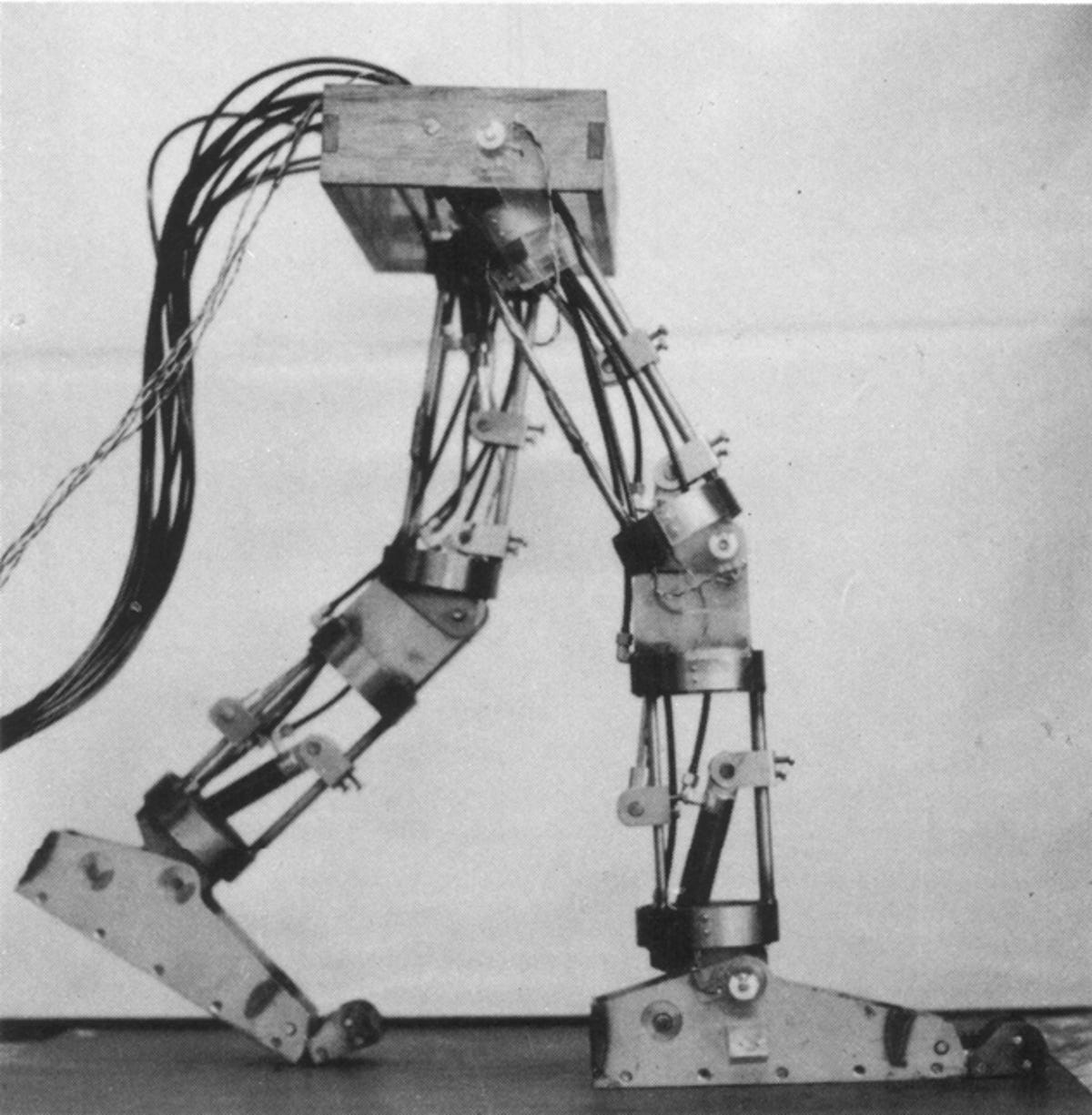
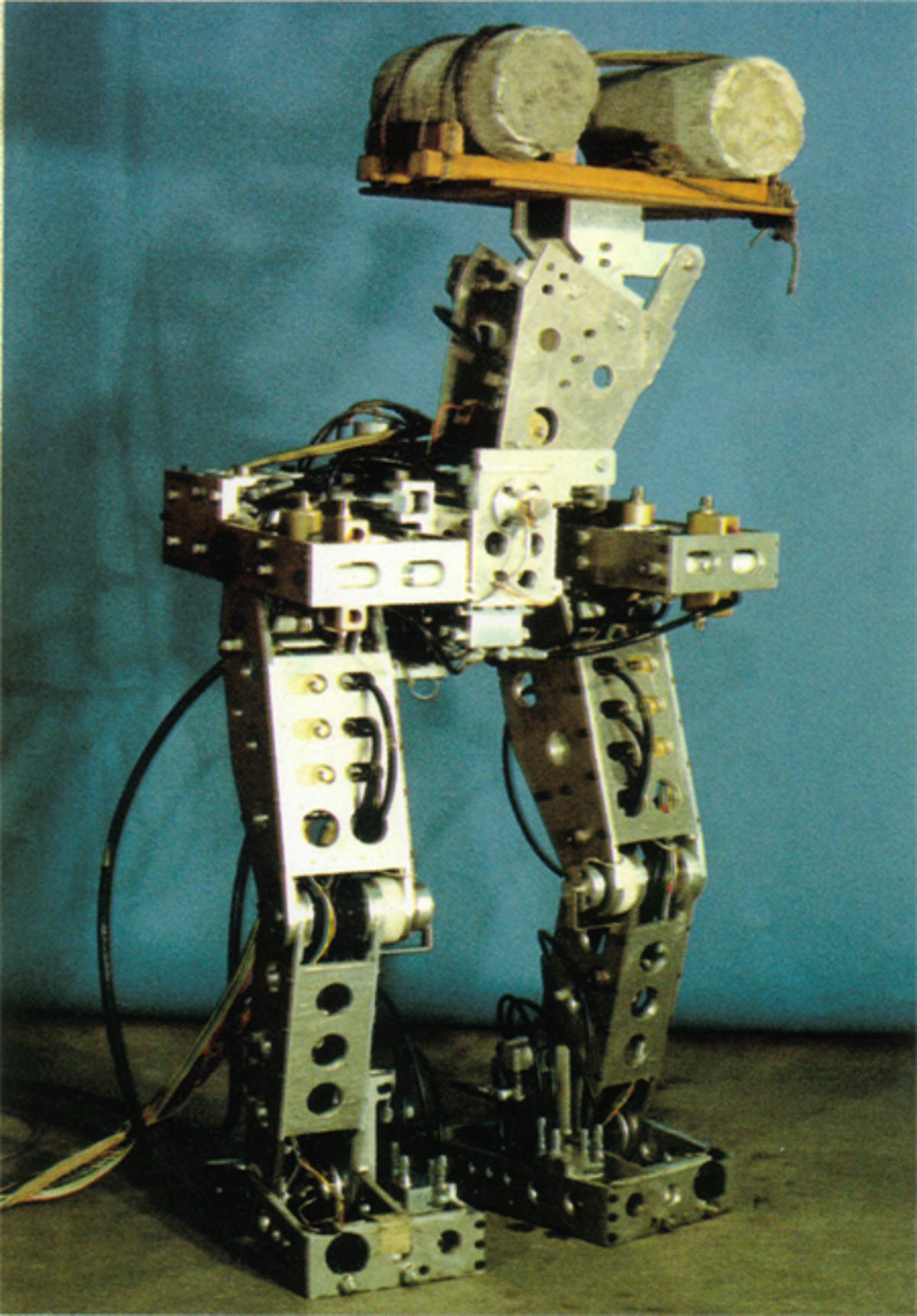
Master-slave walking machine, 1968
The WL-3 for the first time managed human-like movement in a swing and a stance phase which also allowed the limbs to stand up and sit down.
Artificial muscle made of rubber, 1969
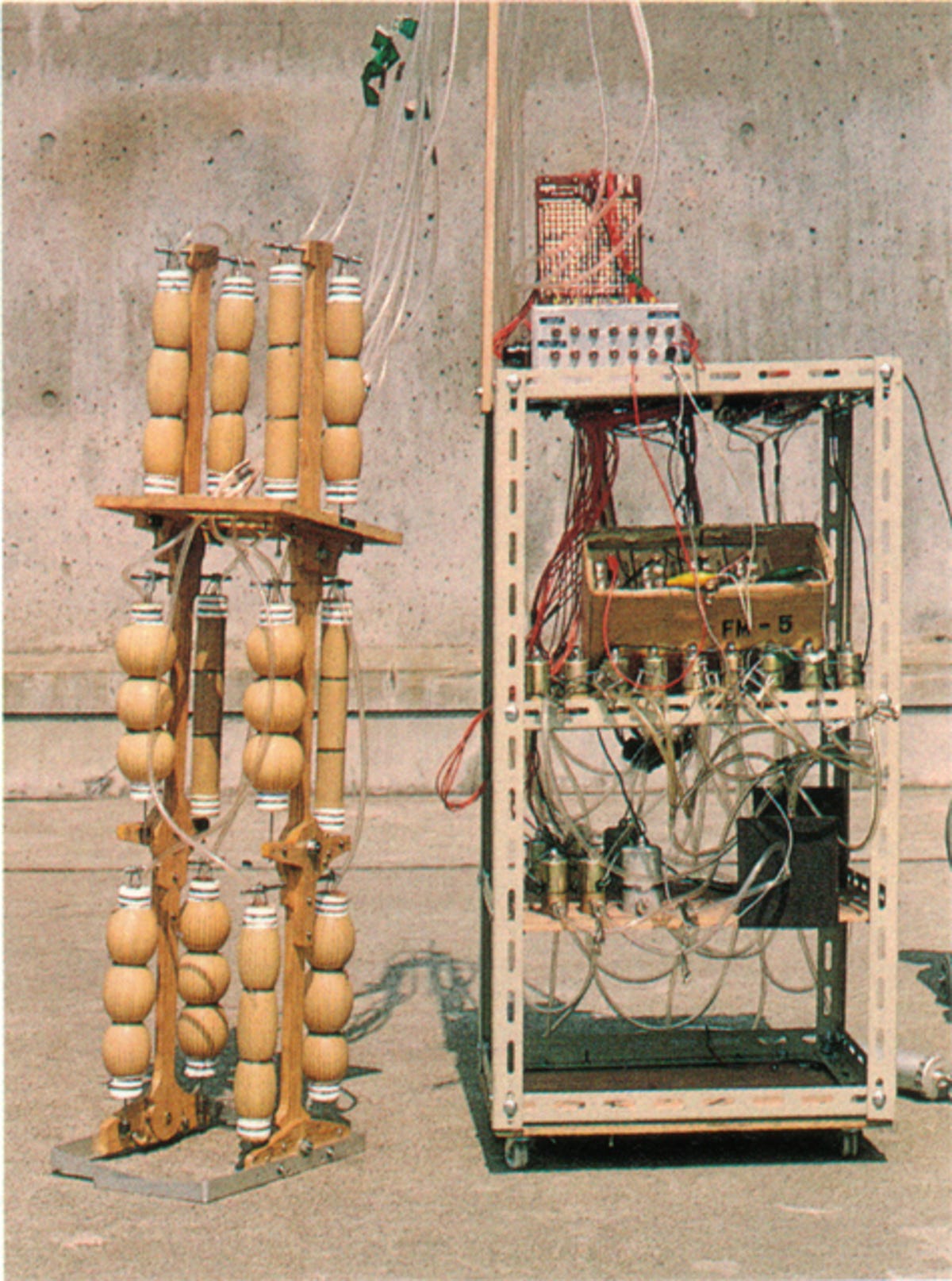
Static Walking, WL-5, 1970
Wabot-1, 1973
Sensors allowed Wabot-1 to measure distances and directions to objects, and the robot could walk and even grip and move objects with hands that used tactile sensors.
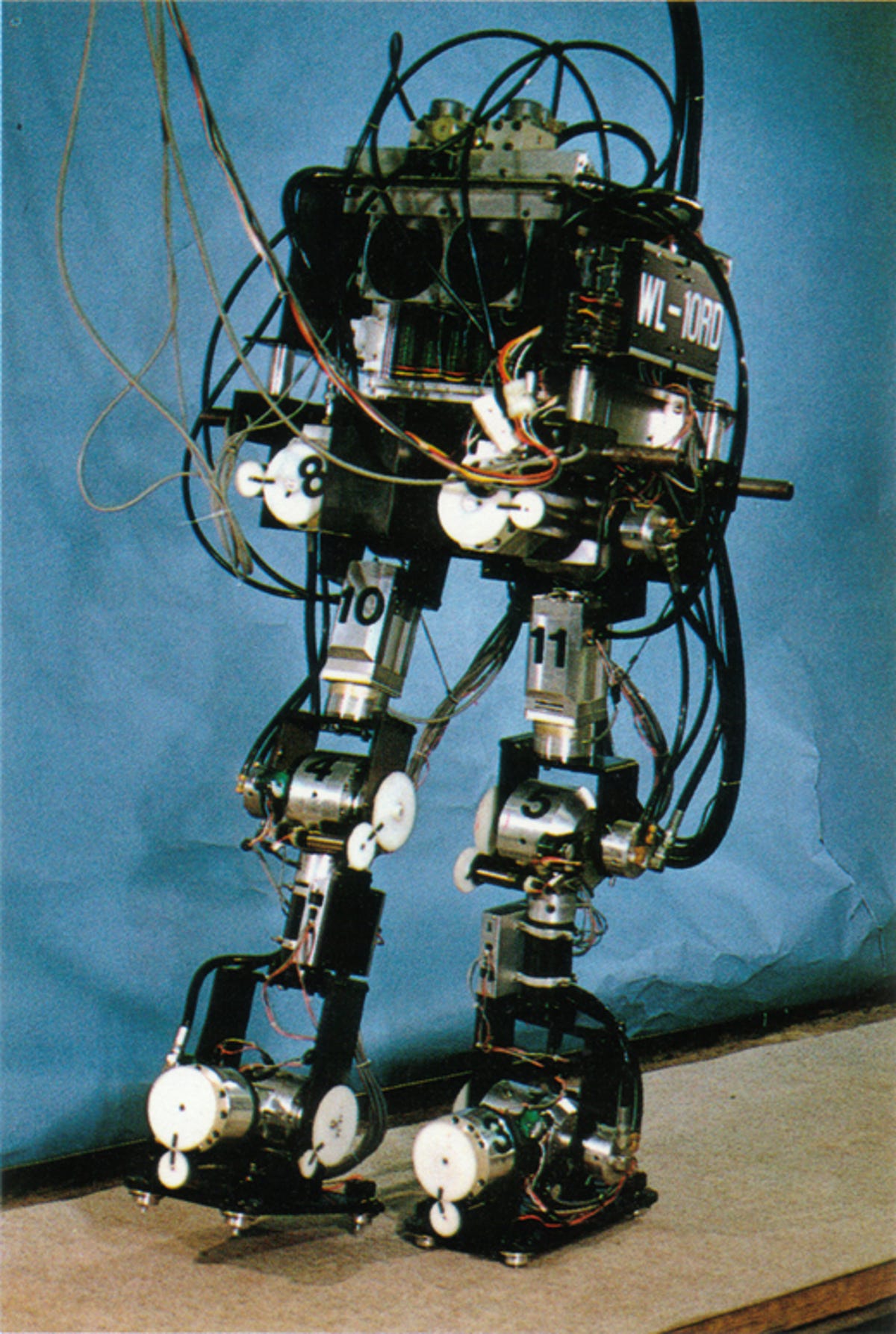
Realization of Dynamic Walking, 1984
This advancement in technology made walking possible for the first time, albeit at just 1.3 seconds per step.

Shadow, 1987

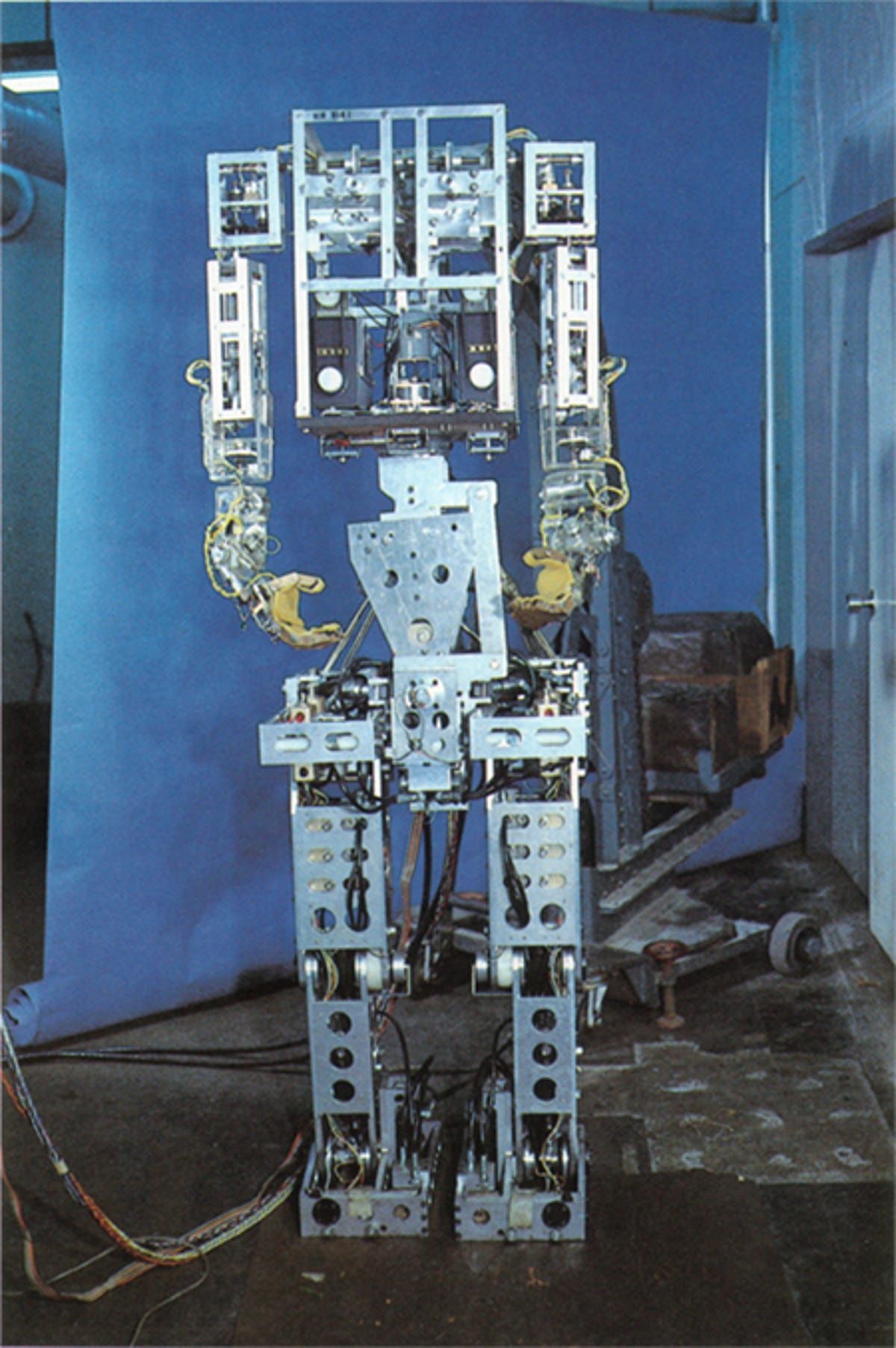
Manny, 1989
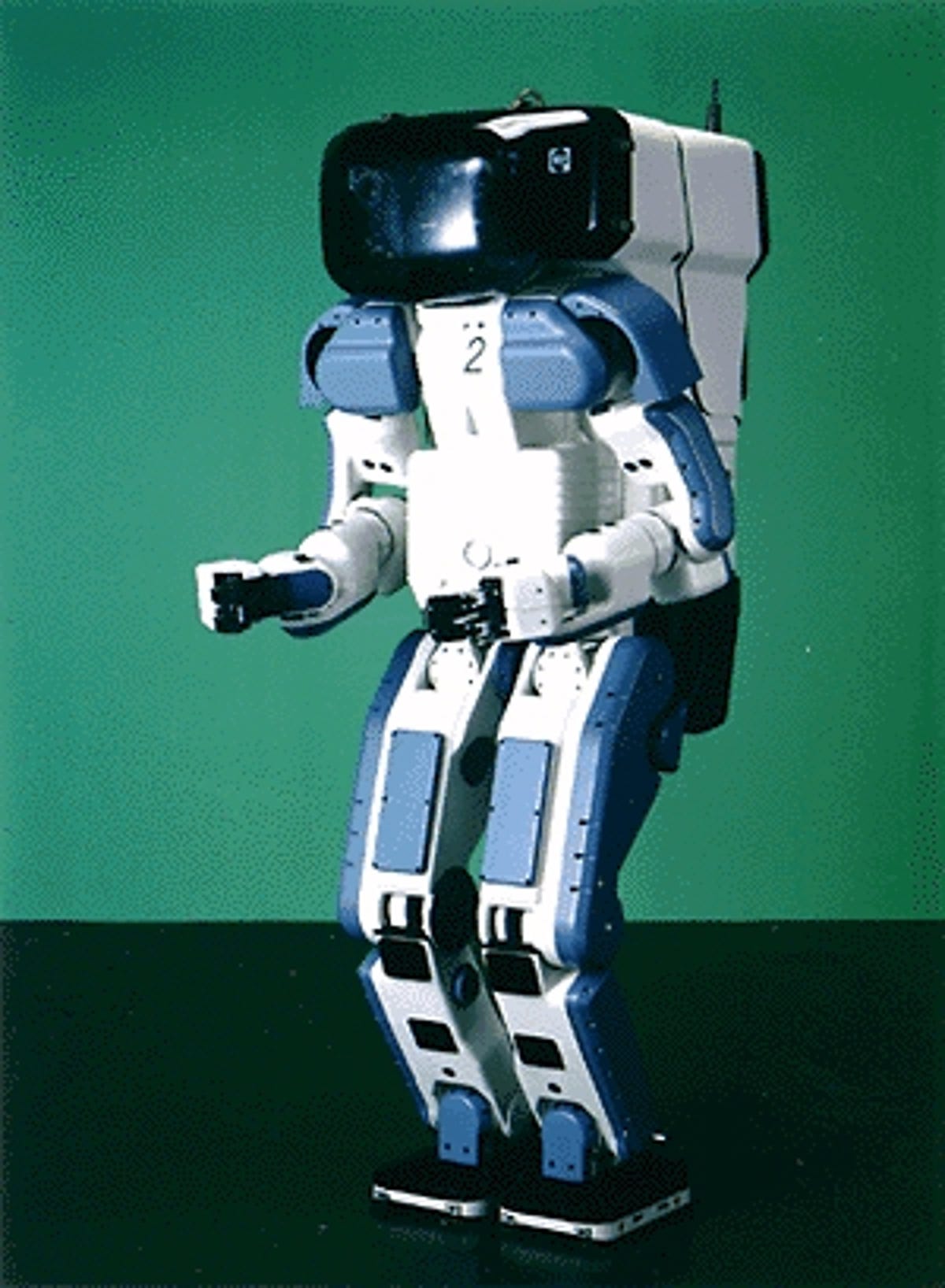
P2, 1996
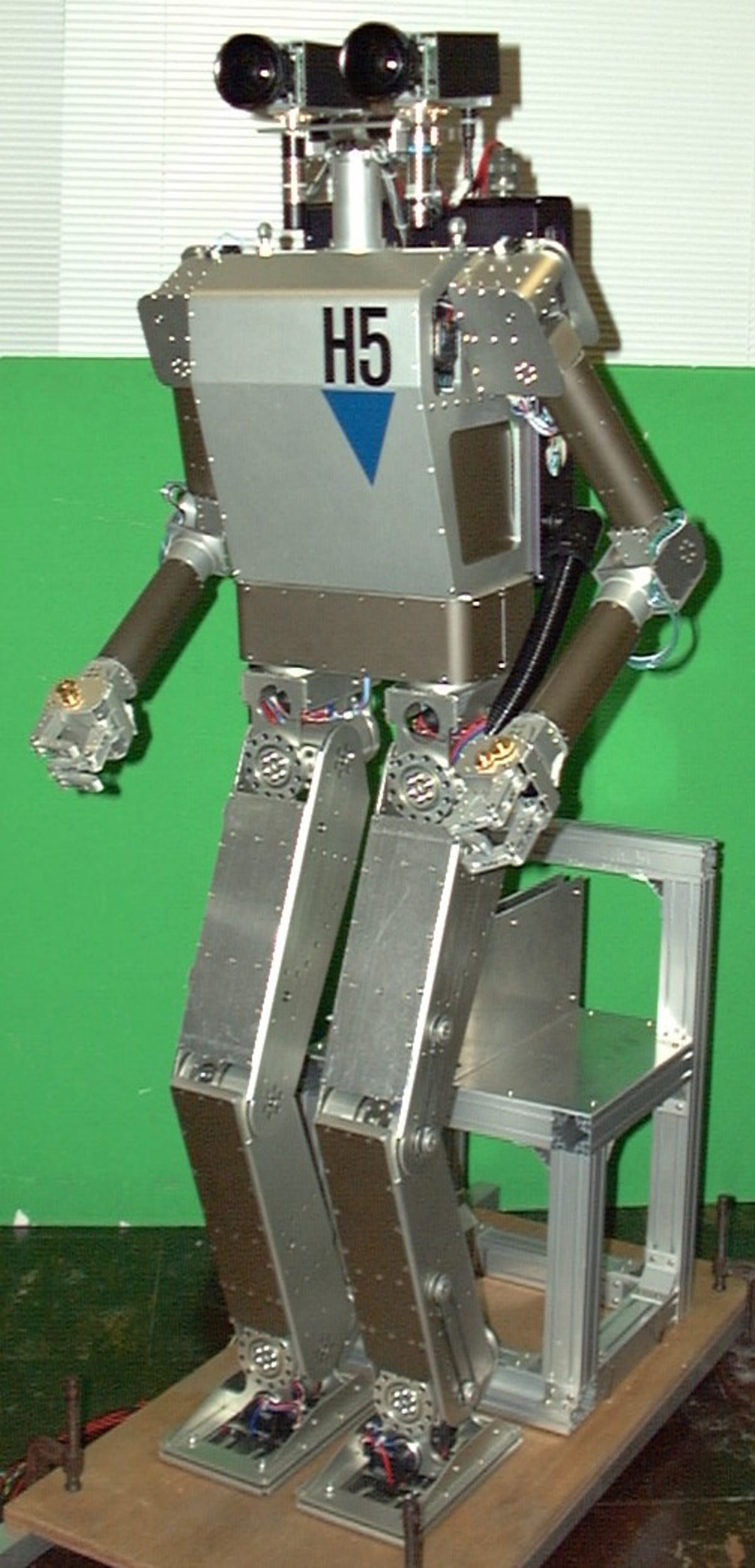
H5, 1998

REEM-A, 2005
In 2007, using the same software as 2006, REEM-A also took part in the RoboCup in Atlanta and was once again a finalist in the penalty kick competition.

Robothespian, 2005

HRP-3 Promet, 2007
The 160cm-tall and 68kg humanoid robot is the upgrade model from HRP-2 Promet humanoid robot jointly developed by Kawada Industry, National Institute of Advanced Industrial Science and Technology, and Kawasaki heavy industry.

Dexter, 2007
Dexter, seen here jumping, has two legs, stands 5-foot and 10-inches tall, and weighs 135 pounds. He can walk, jump, and dynamically balance his robot body to remain standing just like a person does.
Anybots created a system in the robot's body that distinguishes up from down. The system uses that information to constantly adjust the "muscles," or air cylinders, in the robot's legs.
Aero-Blue, 2008
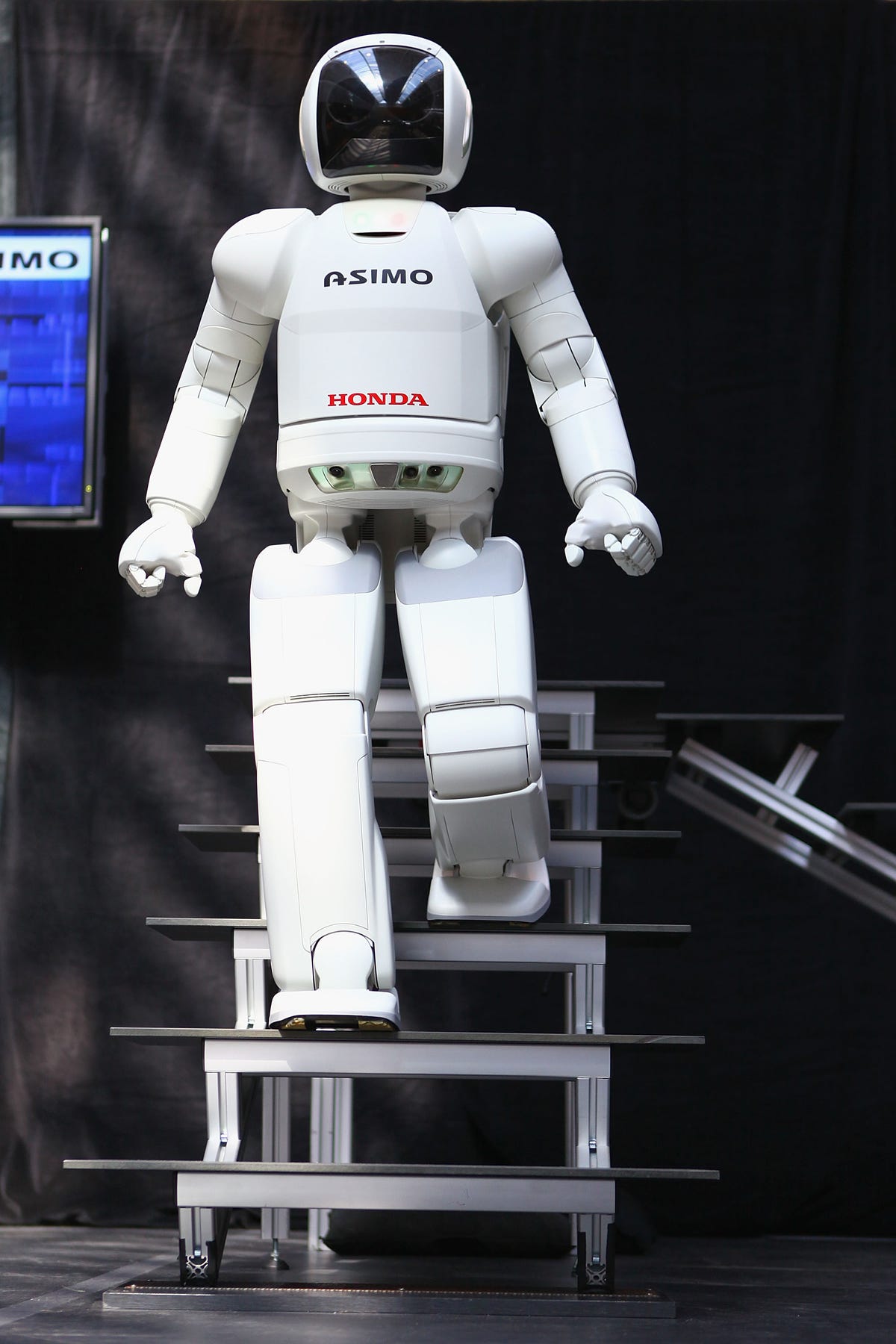
Honda's Asimo

Physical Intelligence
What's next? Why, brains, of course -- and DARPA is working on that, too.
Earlier this year in National Defense Magazine, James K. Gimzewski, professor of chemistry at the University of California at Los Angeles, said that by mimicking self-organizing traits of the brain, we may soon be looking at a revolutionary breakthrough in robotic systems.
Gimsewski has been working with DARPA on a program called Physical Intelligence.
“Rather than move information from memory to processor, like conventional computers, this device processes information in a totally new way," he said.
More Galleries

My Favorite Shots From the Galaxy S24 Ultra's Camera
20 Photos
Honor's Magic V2 Foldable Is Lighter Than Samsung's Galaxy S24 Ultra
10 Photos
The Samsung Galaxy S24 and S24 Plus Looks Sweet in Aluminum
23 Photos
Samsung's Galaxy S24 Ultra Now Has a Titanium Design
23 Photos
I Took 600+ Photos With the iPhone 15 Pro and Pro Max. Look at My Favorites
34 Photos
