Robots explore a Lego lunar surface (photos)
The Google Lunar X Prize Lego Mindstorms Challenge competition seeks innovative robot designs to explore a Lego lunar surface.



Lunar Horizon
Similarly based on engineering, science, and problem solving, teams from around the world are working to build and program a robot that can navigate obstacles and complete tasks on the simulated lunar Lego game board.
Just as the Lunar X Prize is intended to engage more people in the possibilities of commercial space exploration, MoonBots is fueling an increased connection to space innovation for a new generation of future explorers.
During the initial design phase of the competition, teams were required to submit a digital Robot Design Proposal created using either LDRAW, LEGO Digital Designer, or Google SketchUp.
During the build process, teams were required to document their work through a series of writing, blogs, photos, and video essays discussing the design, concept, and importance of moon exploration.
During the month-long open application process, 212 teams submitted proposals for Lego lunar robots, and of those 212, 20 teams were selected to move on to the Mission Round: one attempt at a three-minute Live Mission Webcast to complete the necessary tasks on the game board.
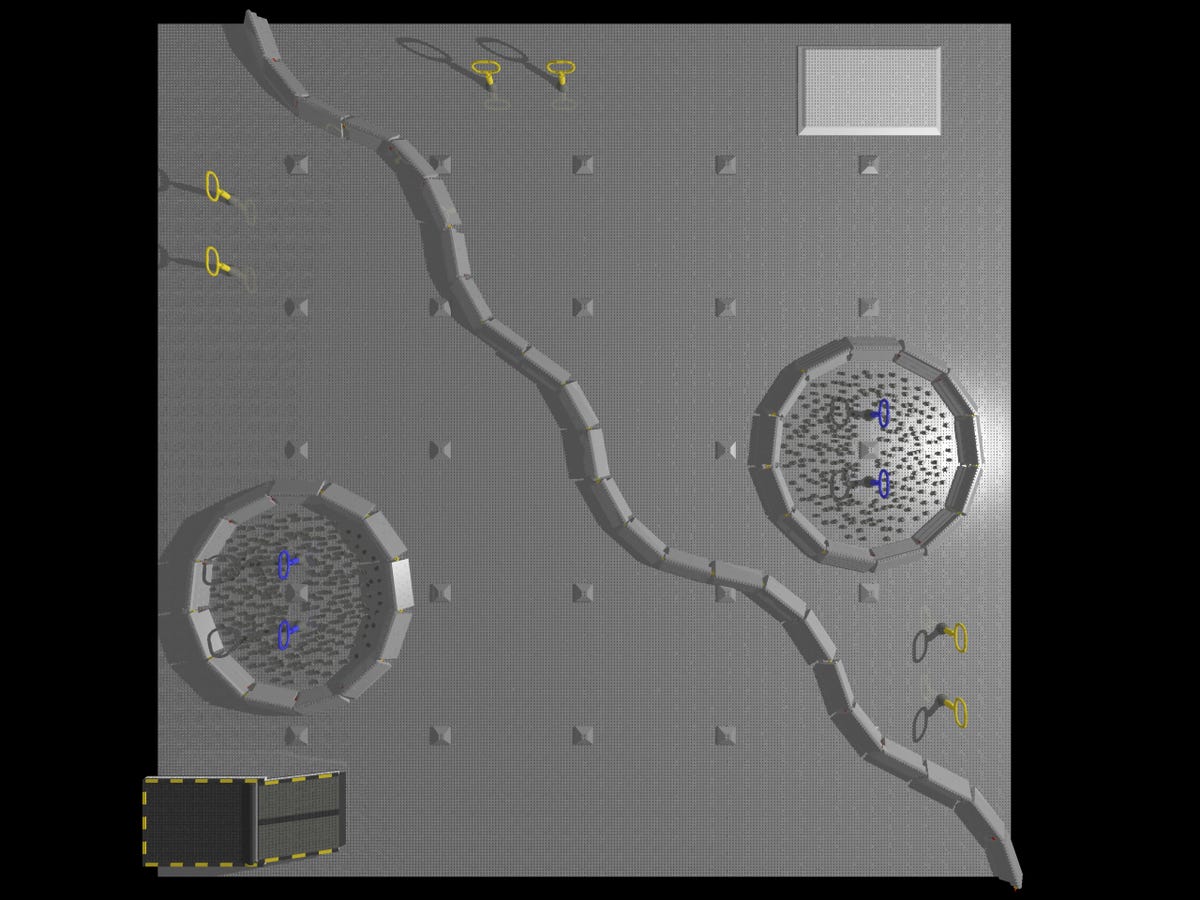
MoonBots Game Board

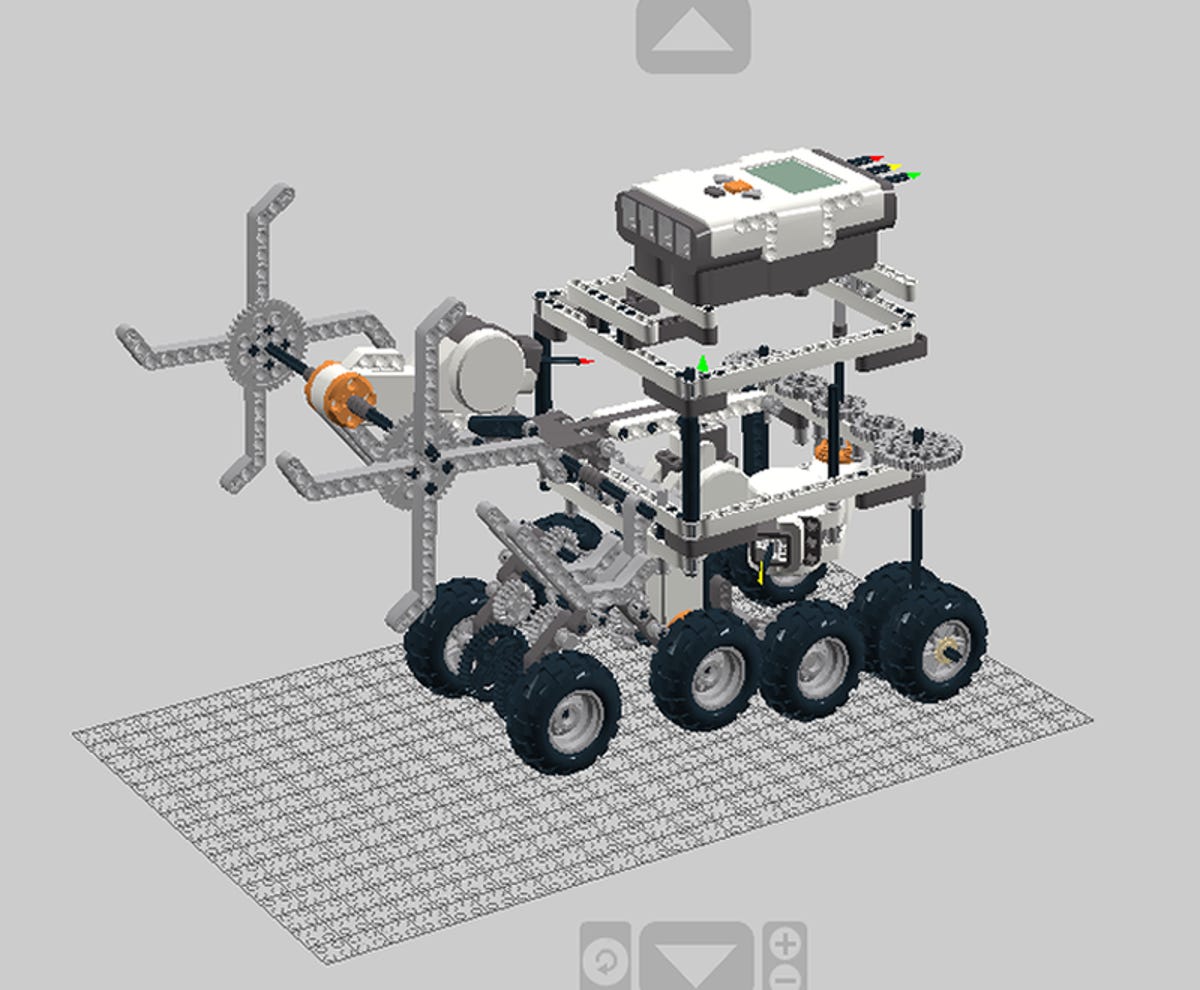
OABB 4-H Lego Robots Team# 175 MoonBots Design Proposal
This robot, designed by OABB 4-H Lego Robots, implements a few unique concepts to navigate the game board. Using free or open-source software, the OABB 4-H Lego Robots team used the Lego Digital Designer software to create the design of the robot.
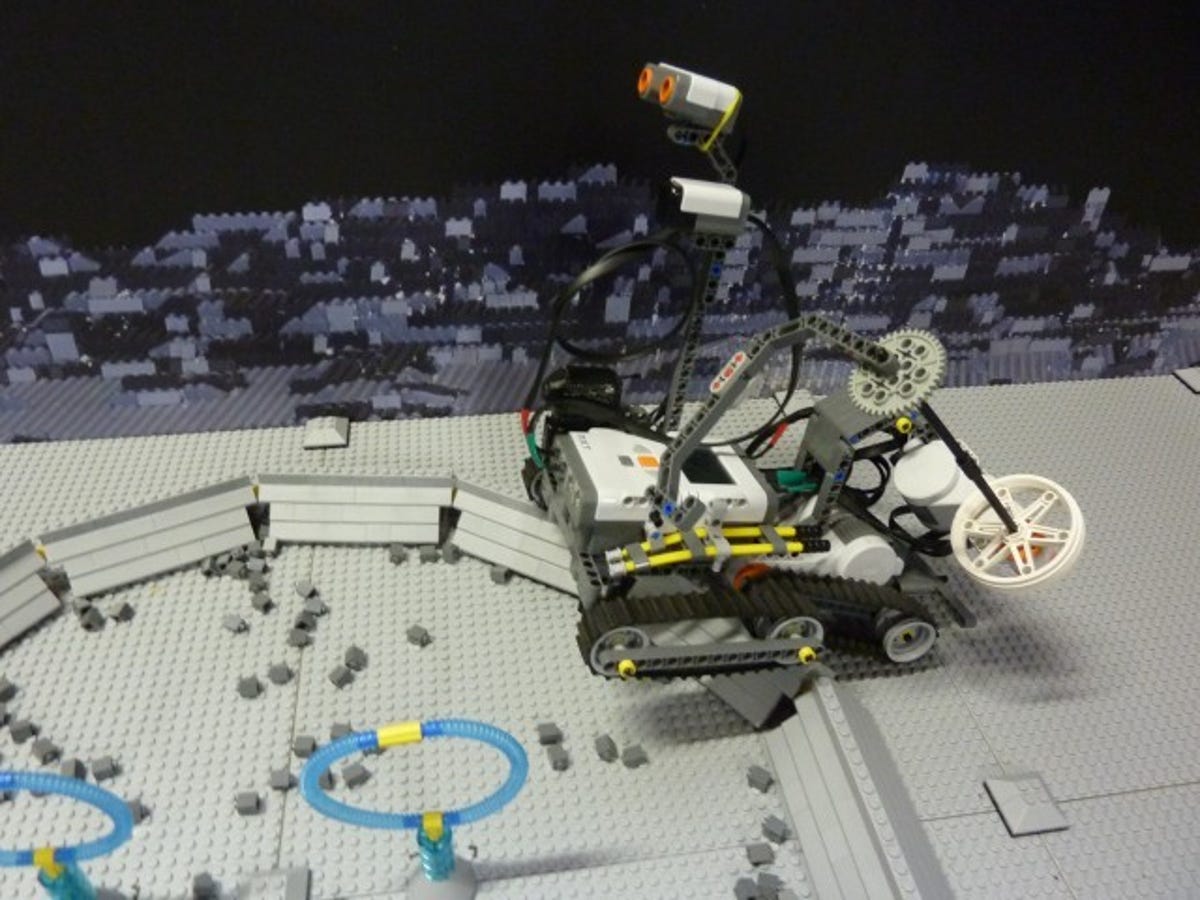
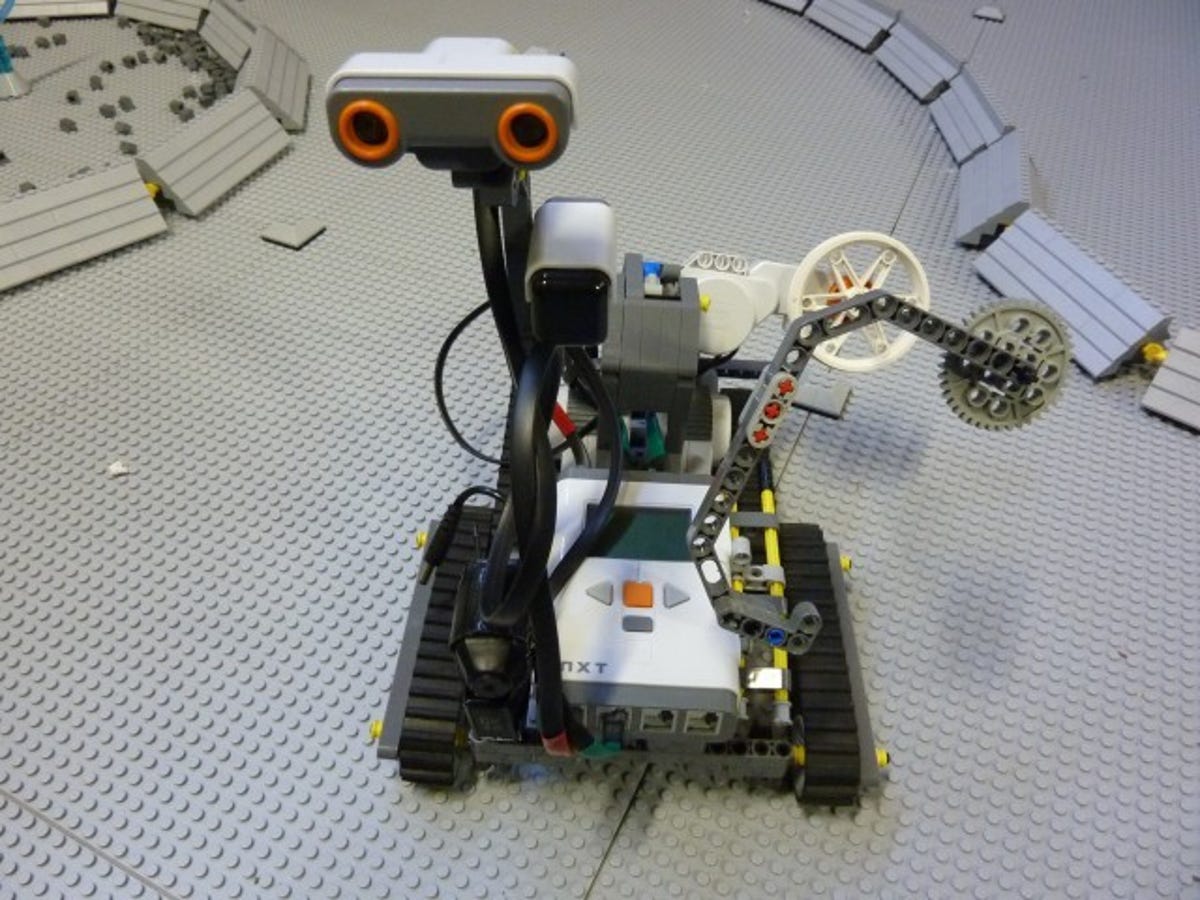
At the front of the robot, the forks can be extended to collect the "Helium 3" and "Water Ice" elements and then raised as the robot continues on its mission.
The camera, suspended from the tower above the main chassis, will stay level and be able to record the mission and heritage artifacts clearly while also giving a good view of the terrain in front of the robot as it moves.
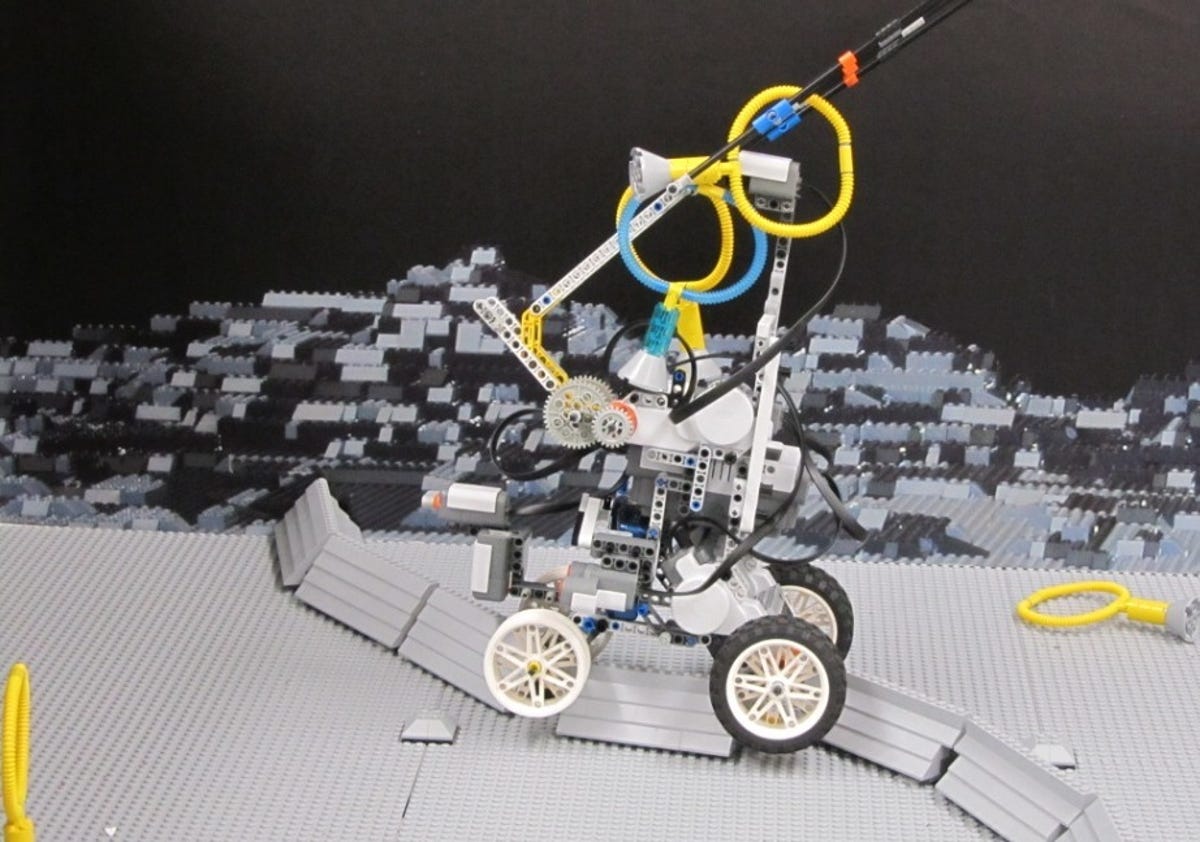
Intergalactic Bacon MoonBot Google X Prize
Building a robot to successfully navigate all of the challenges of the lunar landscape, Intergalactic Bacon decided that its robot needed to be highly maneuverable and capable of navigating the ridges, hills, and craters of the landscape while also being able to collect the Water and Helium reserves and successfully return them to homebase.
When considering possible drive trains for its vehicle, Intergalactic Bacon chose a Swivel drive that increased maneuverability and allowed it to not have to turn, reducing the directional errors commonly associated with a change of course.
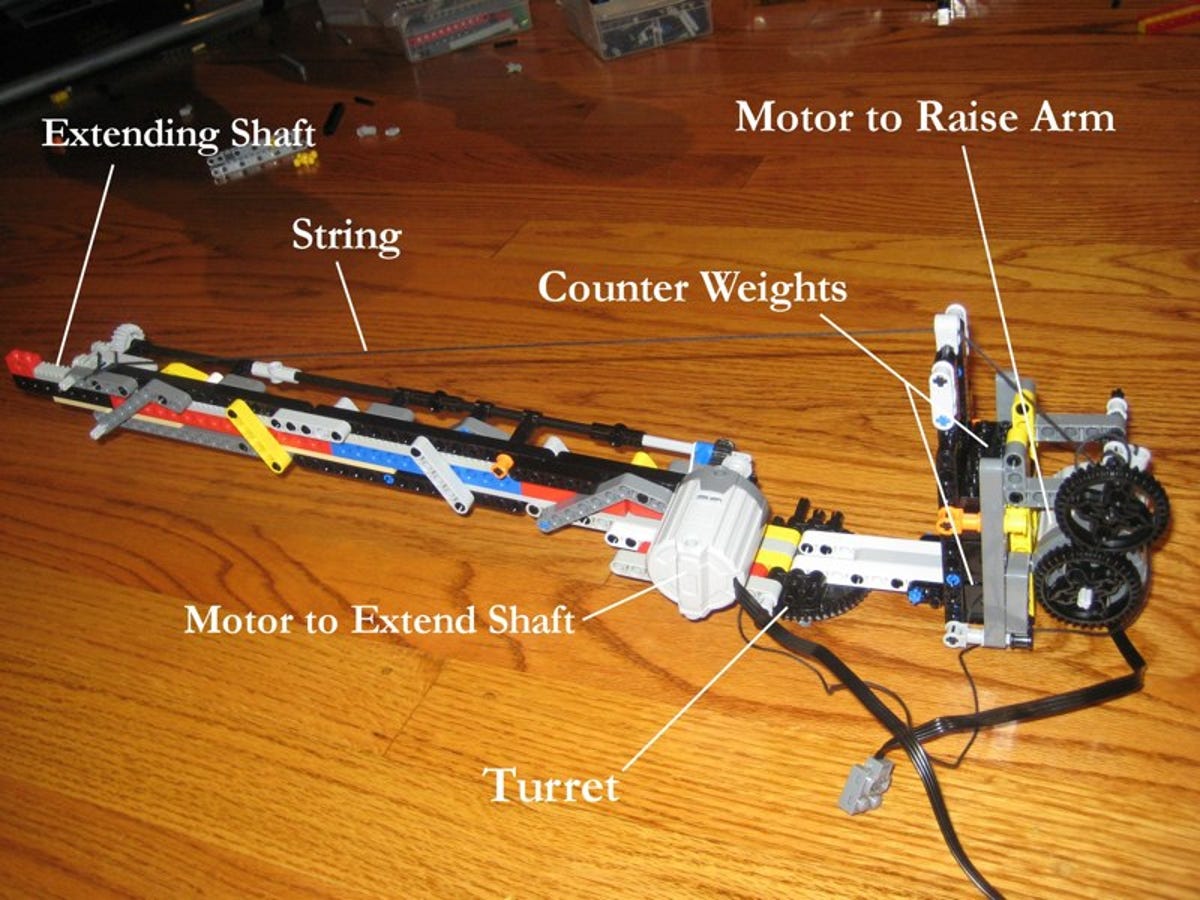
A crane-like extendable arm is another feature Intergalactic Bacon came up with to avoid obstacles. With a long reach, the robot is able to avoid the problems associated with going into the craters, including the steep walls and dusty regolith floors.
To help compensate for the high center of gravity created by the long arm, the team implemented a suspension system on its crab drive to stabilize the robot when going over the bumpy ridge that bisects the lunar play field. The team chose all of the sensors based on experience and understanding of them and the belief in which ones will give the most accurate data on location.
Team Lunar Horizon
The nice thing about its navigation program is that it self-corrects itself. Cumulative errors (small errors that make a big impact over time) is not an issue with this robot. To make precise turns, its robot first spins around in a circle (it is smart enough to know if it is shorter to turn clockwise or counterclockwise) and then aligns itself to the desired angle with a tolerance of plus or minus 5 degrees. It then makes a smaller angle adjustment with a smaller tolerance of only plus or minus 1 degree. The ultrasonic sensor then detects how far the robot is from the wall ahead, and the robot then drives toward the next destination. Using this method, the robot can drive very accurately despite the moon rocks or regolith in the craters.
Team Lunar Horizon
It features a self-correcting navigation method that uses a compass sensor and ultrasonic sensor.
Acting on the premise that small errors have a big impact over time, the team decided to minimize directional navigation problems.
To make precise turns, the Lunar Horizon robot first spins around in a circle and then aligns itself to the desired angle with a tolerance of plus or minus 5 degrees. It then makes a smaller angle adjustment with a smaller tolerance of only plus or minus 1 degree. The ultrasonic sensor then detects how far the robot is from the wall ahead, and the robot then drives toward the next destination. Using this method, the robot can navigate the playing field very accurately, despite the moon rocks or regolith in the craters.
Shadowed Craters
To get around this problem, Shadowed Craters used a Ferris-wheel style retrieval mechanism which rotates each sample backward, depositing the samples securely onto a hook all in one motion.
Crandroids
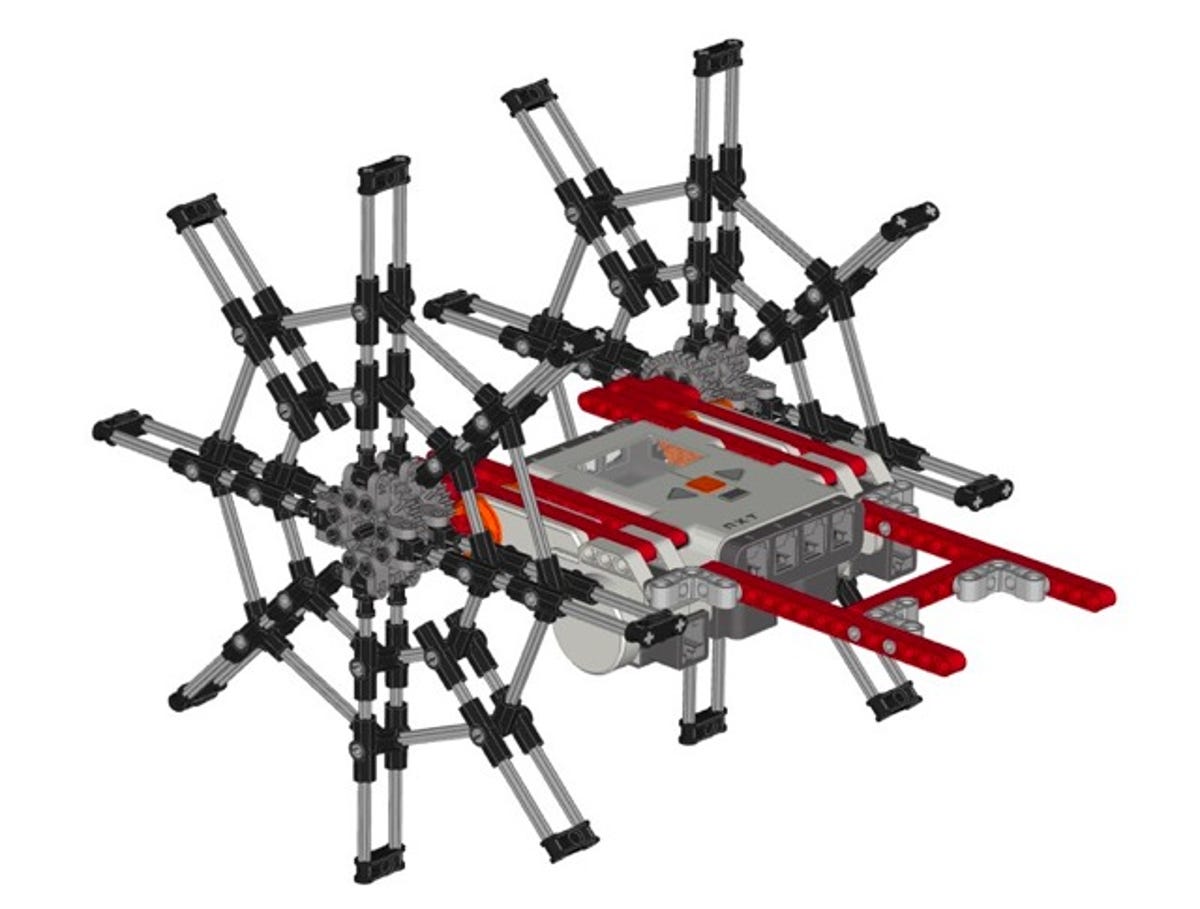
Yellowjackets
Absent of wheels, the robot moves using two large Ferris wheel-like claws that can easily climb the obstacles.
In addition, the robot uses many different tools to navigate the lunar Lego board, including a touch sensor that counts the studs on the Lego board.
A plate mounted on the bottom of the vehicle makes physical contact with the Lego boards on the course, hitting the studs and pushing on the touch sensor, counting each stud as it moves along.
The robot also uses light to count the studs on the board. A light sensor and a light source are mounted at right angles to each other near the base of the robot. The light from the lamp hits the stud, reflecting into the sensor, counting each bump as it passes by.

Moonwalk
Designed to pick up the water and helium elements from outside the crater, avoiding the perilous regolith floor and steep crater walls, the arms instead are designed to knock the loops onto the front section of the basket.
The basket is cleverly designed so that the front section can swing back and forth. The swinging is controlled by a Scout motor, represented by orange bricks. Once the loops fall onto this section, the spikes hold them in place until the motor can flip them into the main section of the basket.
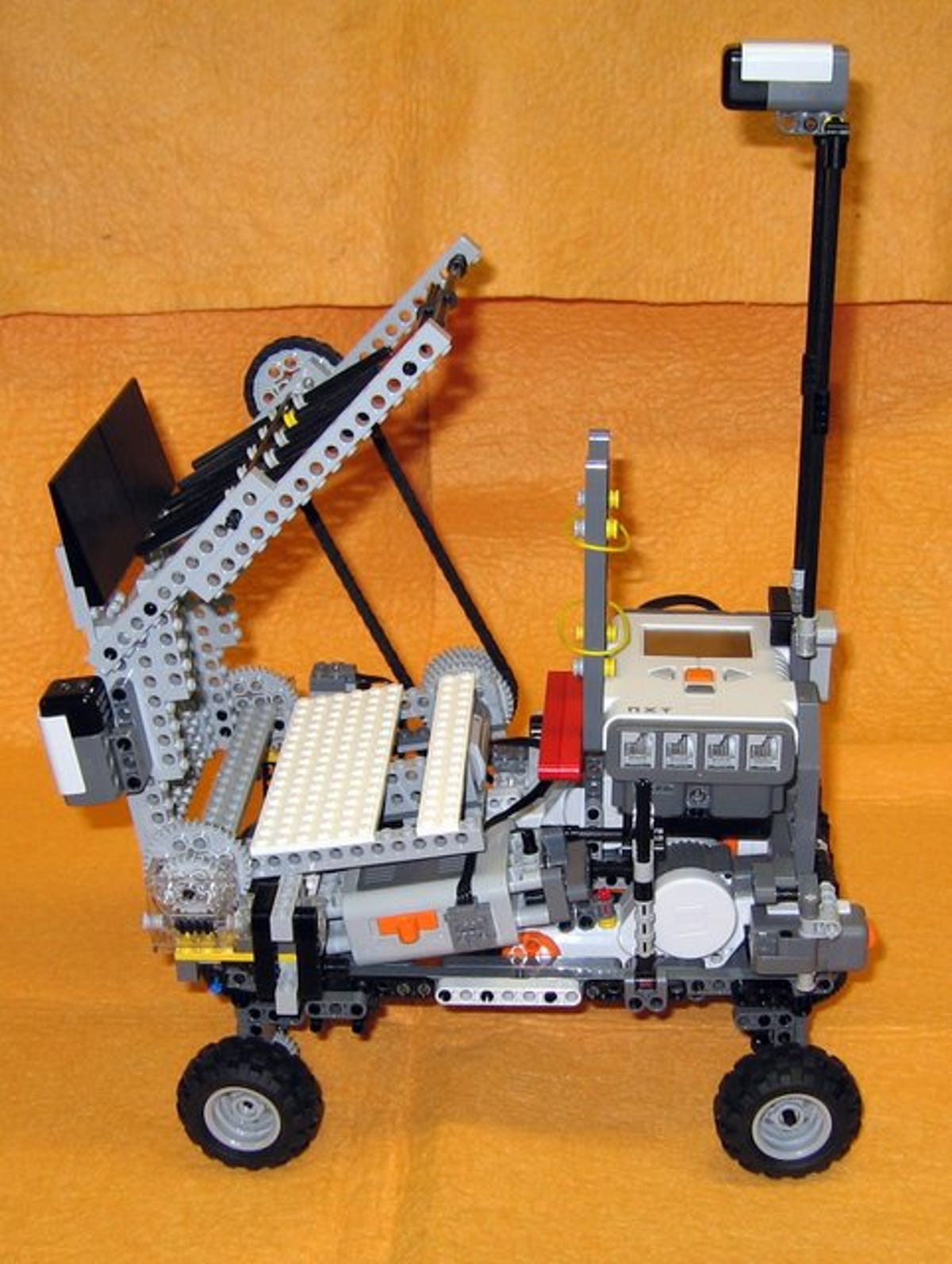
Team Cougar MoonBot
The sensor on the left side of the tool is an EOPD sensor (Electro-Optical Proximity Detector) that will help the robot detect objects near the ground. The compass sensor on the top will orient the vehicle, keeping it on course.
On the back of the robot is a touch sensor to help with orientation and movement, allowing the vehicle to move in reverse and turn by orienting with the walls.
More Galleries

My Favorite Shots From the Galaxy S24 Ultra's Camera
20 Photos
Honor's Magic V2 Foldable Is Lighter Than Samsung's Galaxy S24 Ultra
10 Photos
The Samsung Galaxy S24 and S24 Plus Looks Sweet in Aluminum
23 Photos
Samsung's Galaxy S24 Ultra Now Has a Titanium Design
23 Photos
I Took 600+ Photos With the iPhone 15 Pro and Pro Max. Look at My Favorites
34 Photos
