Get a grip: Robotic hand inspired by cockroach legs
Researchers at Harvard and Yale determine that intelligence isn't imperative when they turn to the flexible and springy legs of tiny-brained cockroaches to design a robotic hand.


The robotic hand is getting a makeover, and it is inspired not by computing power but rather by the flexible and springy legs of tiny-brained cockroaches.
It turns out that robotic hands, which can inform the development of prosthetic ones, are rarely able to perform simple tasks that require dexterity, such as picking up a delicate object without first knocking it over.
Key to being able to grasp an object is the ability to quickly assess the relationship between that which is doing the grasping (i.e. a hand) and that which is being grasped (i.e. the Motorola Xoom).
Many mammals, humans among them, compensate for any errors in navigating this relationship by softening their fingers to make the grasp more flexible. Many artificial hands have been designed with this flexibility in mind, but the computing power required to control all the sensors and motors was so high that the hands were, by extension, quite slow.
"We took the opposite approach and tried to understand the fundamental mechanics using good mechanical design practices," says Aaron Dollar, an assistant professor of engineering at Yale, in an Inside Science News Service report. The goal was simply to engineer a hand that was able to adapt quickly to grasp a variety of shapes.
Dollar and colleague Robert D. Howe, who heads Harvard's BioRobotics Laboratory, point to research done at the University of California at Berkeley, dating back to the '80s, on how cockroaches navigate uneven surfaces. Their tiny brains made high-level computing unlikely, and researcher Robert Full discovered that the mechanics of the legs themselves, being flexible and springy, enabled fast adjustment to uneven surfaces automatically.
Over time, Full built an eight-legged robot that, for the first time, could run over uneven surfaces quickly. (See his TED talk on the process here.) This prompted Howe and Dollar to consider the applications for grasping, not just running, because both require object-to-object navigation.
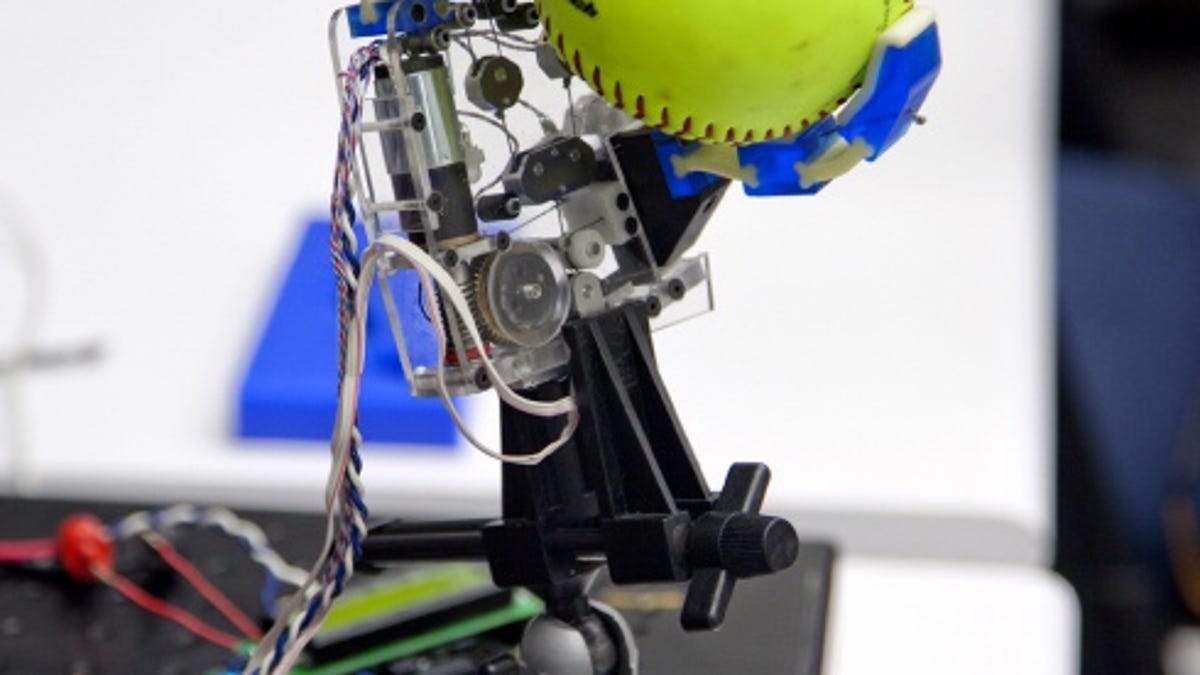
The result: a four-fingered hand (think of a cross between humans and Bart Simpson) with sensors whose joints are more flexible at the base than at the fingers. The simple hand, made using polymer-based Shape Deposition Manufacturing, has been proven to grasp a wide range of objects. (Results were published in December 2010 in the International Journal of Robotics Research.) At less than 1.5 ounces per finger, the design has inspired Dollar to use this approach in prosthetic hands, which are often heavy.
At this point, the hand cannot grasp objects as small as, say, cutlery or keys. To do so would involve more motors and weight. In the meantime, Dollar is already working on a version that includes an opposable thumb.