These walking robots could help humans get back on their feet again
Bipedal robots could explore Mars one day. But first they're teaching scientists at Caltech's Amber Lab important lessons about helping humans here on Earth.


- Webby Award honoree, 2x Gold Telly Award winner

Watching a robot trip and fall makes my heart sink. The worst part about it? I'm the one responsible.
I'm standing in a Pasadena, California, lab filled with bipedal (or two legged) robots. A researcher challenges me to try and trip a 5-foot, semihumanoid robot called Amber that's walking on a treadmill. It's attached with a rope to a railing above as it walks in place, so it's only going to fall forward or backward if I'm too heavy-handed.

Still, it feels cruel, even though I know the robot doesn't have feelings. Gingerly, I stick my hand out in front of Amber's right leg and watch as it stumbles and loses its footing, just like I would if I accidentally kicked something in my path. To my surprise, the robot recovers and keeps on walking at the same steady pace like nothing ever happened.
Next, I push its torso with a long metal ruler. The robot recovers again.
This process might sound mean, but it's what researchers at Caltech's Amber Lab call disturbance testing. It's all part of understanding how robots walk.
Ph.D. student Wenlong Ma demonstrates how he performs disturbance testing on the robot. He has designed controllers that help the robot recover when it encounters unplanned scenarios (like being poked with a long ruler).
We're used to seeing robots from companies like Boston Dynamics run, jump and even do parkour. But the robots at the Amber Lab aren't just about performing fancy tricks. By understanding how robots locomote, researchers at the lab can directly translate that to devices that help people with walking difficulties. Or people who can't walk at all.
"Every time we achieve a behavior like walking or running, we'd like to put that on a prosthetic device and ultimately an exoskeleton for a paraplegic," says Dr. Aaron D. Ames, Bren professor of mechanical and civil engineering at Caltech who leads the Amber Lab. The lab's main focus is experimental research in bipedal robotics. "We would like to have [a paraplegic] get up and walk with the same kind of algorithms that we're using on our walking robots."
Rather than trying to emulate or mirror human behaviors on a robot, Ames and his team are trying to understand the mathematics of locomotion. So if the robot falls, the researchers don't just try to adjust settings on the bot to make it work. "We come back to the basic science and then iterate through the math and the algorithms to try it again," he says.
The robots use electric motors rather than hydraulics, which give them subtle actuations that make them more suited to being used as assistive devices.
One of the prosthetics developed at the lab is the Ampro 3. It's a powered, transfemoral (above the knee) prosthesis with two degrees of freedom at the ankle, designed to make people walk better than with existing devices. I watch as Ph.D. student Rachel Gehlhar demonstrates what it's like to walk around with Ampro. An inertial measurement unit (IMU) modulates the movement of the synthetic leg based on how fast the wearer walks. So if Gehlhar walks faster, Ampro will also speed up.
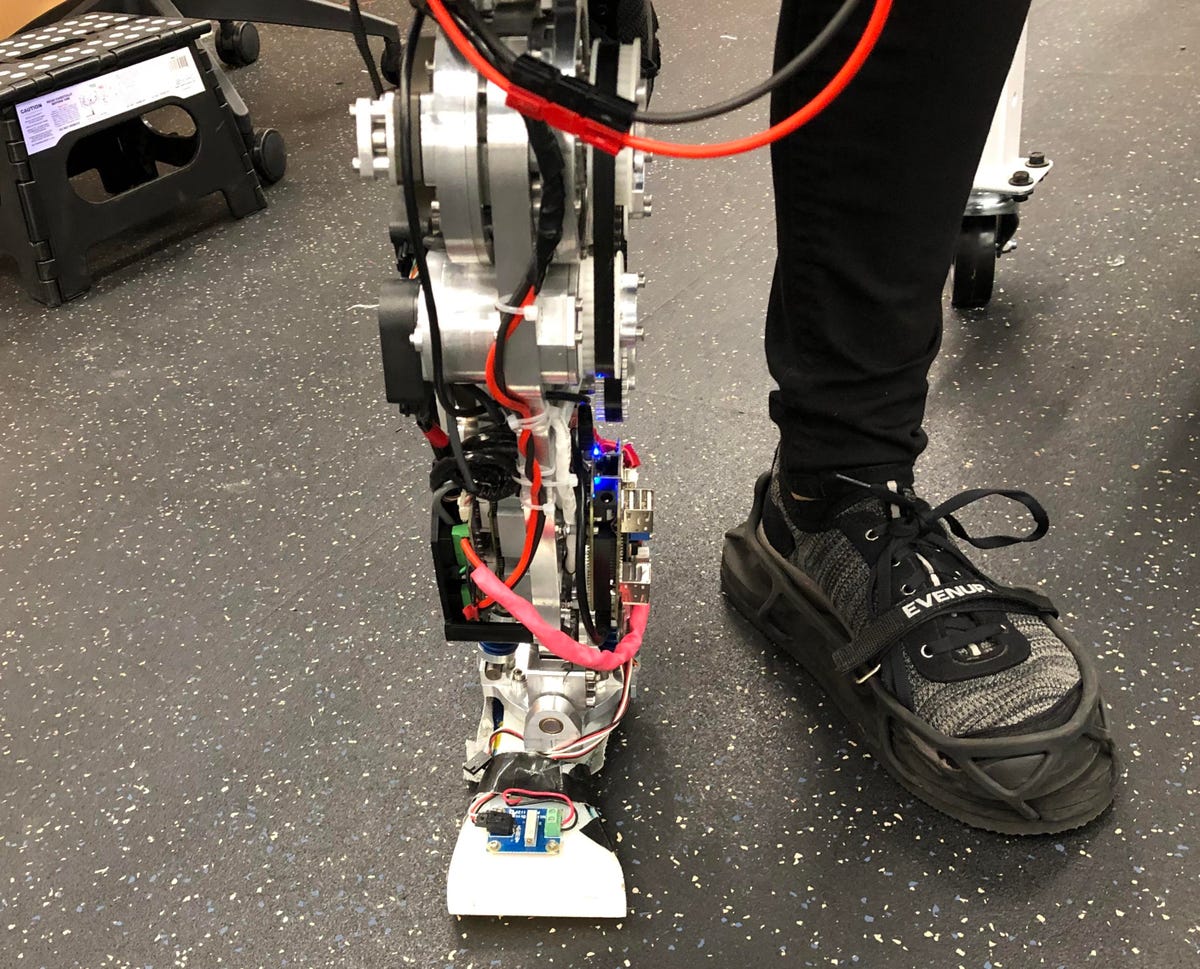
The Ampro 3 weighs around 11 to 12 pounds, a little more than the weight of a human lower leg.
Large windows line the hallway alongside the Amber Lab, so passers-by can get a good look at how students build and test the robots. The lab itself is about the size of two large rooms, with a workspace on one side where students do a lot of the engineering work. There are four main robots being worked on during my visit: a hopping robot attached to guard rails; Amber; Ampro; and Cassie, an untethered bipedal robot that moves in three dimensions. On the other side of the lab, there's a giant treadmill built into the floor that can reach speeds of up to 40 miles per hour for more extreme testing scenarios.
The long-term outlook for the robots at the Amber Lab is to have them traverse the same sorts of terrain as humans. Similar research is being conducted at places including the Florida Institute for Human & Machine Control on robotic parts that can withstand rugged terrain.
Indoors, all robots really have to deal with is flat treadmills or gentle slopes. But out in the real world, the ground isn't uniform. Dirt is uneven and sand unstable.
That's what robots like Cassie are designed to tackle. Developed by Agility Robotics, is used by students and researchers at the lab to understand how walking algorithms translate outdoors.
Cassie's walking controllers designed by researchers at Caltech allow the robot to walk outside and travel on uneven surfaces like sidewalks, grass and dirt.
Cassie is still far off from being able to tackle snow or really challenging terrain. But Ames and his team are making progress in transitioning robots from controlled environments in the lab to the real world.
When bipedal robots are truly able to achieve autonomous locomotion over long distances, they could be used for exploring extreme environments -- like the surface of Mars.
"It's that idea of getting robots into doing things that are sort of at the apex of human capability, whether it's handling different terrain, or moving very quickly," says Ames. "Those are kind of the two fronts, I think, as a robotic community we are shooting for."
As for visions of robotics from science fiction, Ames cites Isaac Asimov's I, Robot stories as the version he wants to bring to reality.
"They're not the scary Terminator. They're actually there to make our lives better."
The video on this page is an episode of Beta Test, the show that puts you in the front seat with me as I test our crazy tech products and experiences. Check back each month for a new show! You can also find the series on YouTube.