How lasers map the world for self-driving cars
For a car to drive itself, it needs to sense its surroundings. Laser arrays build a precise 3D model of every object in a car's vicinity within seconds.


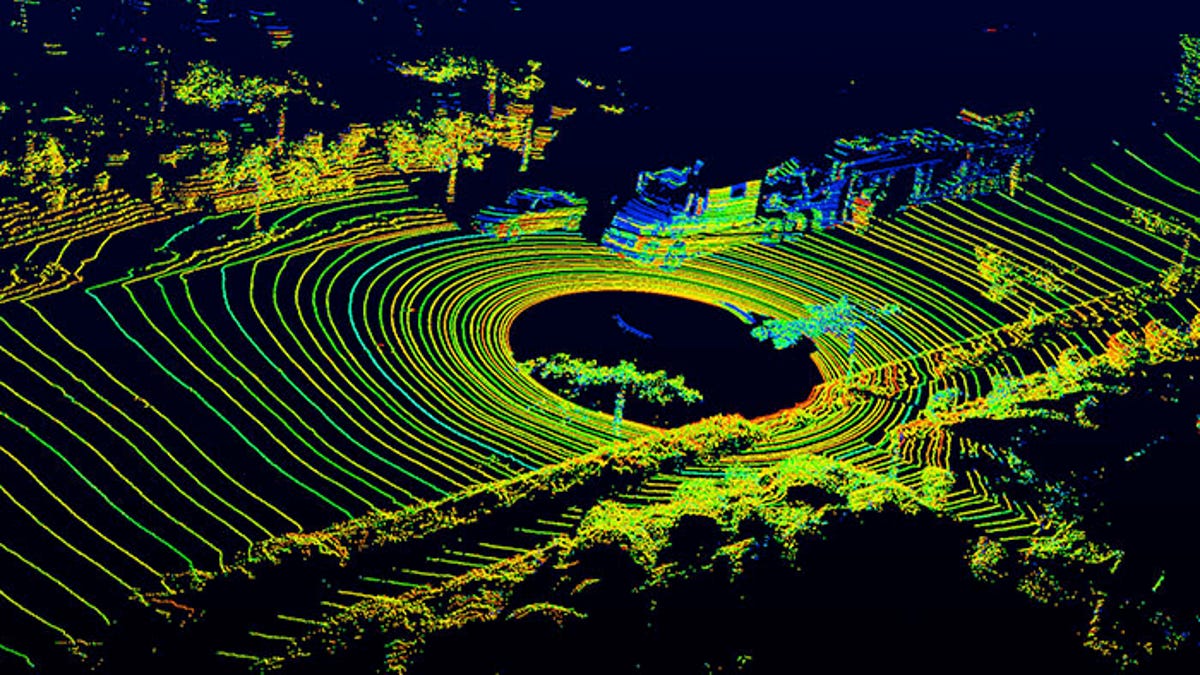
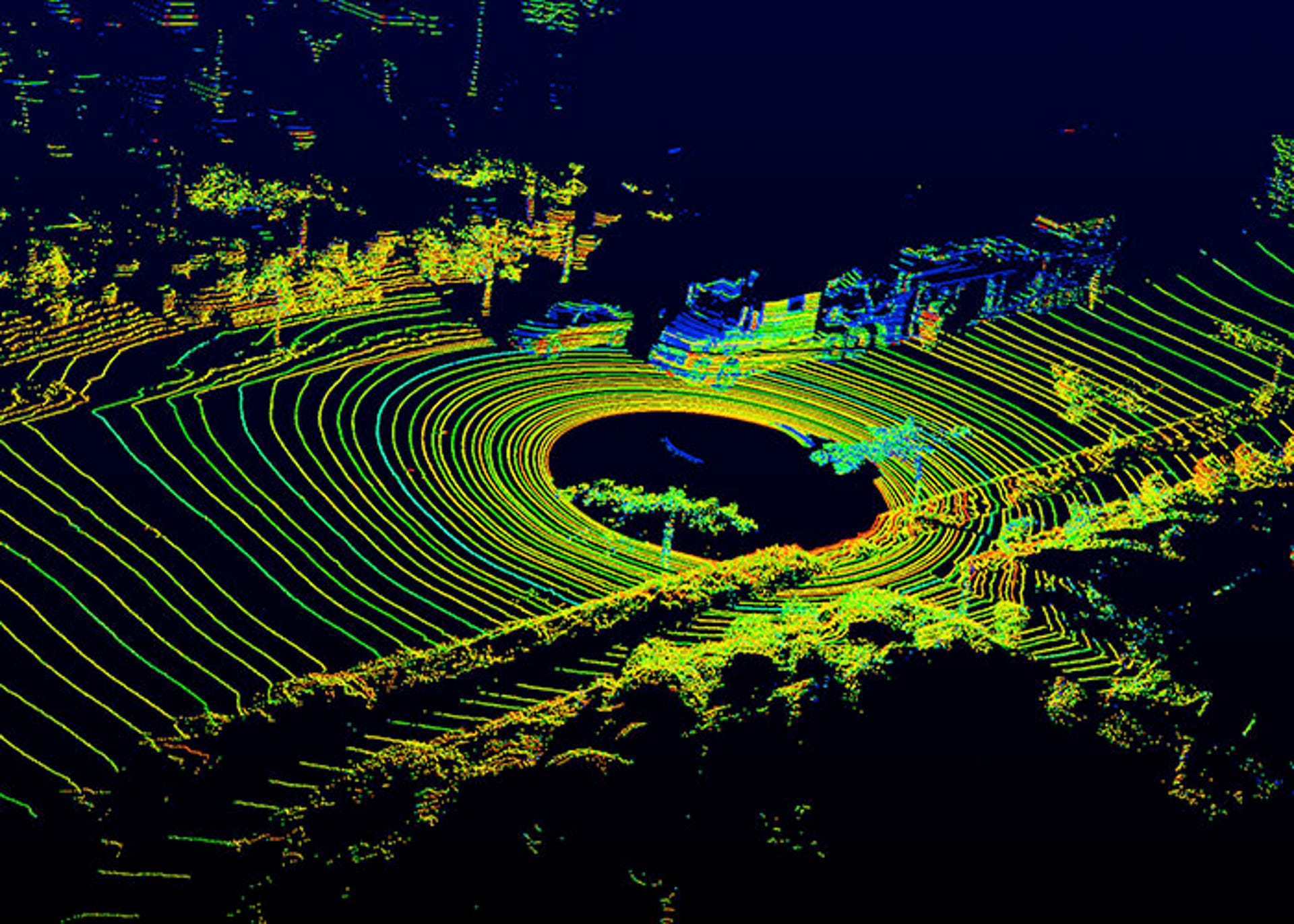
A single frame from a lidar point cloud doesn't look like much, just a small number of colored dots on a black background. But taken over time, with a midrange lidar array shooting 700,000 laser pulses per second, you end up with a very precise 3D model of the immediate surroundings.
Automakers and equipment suppliers generally acknowledge that lidar, along with radar and cameras, is a key sensor technology for developing self-driving cars.
Lidar, which stands for light detection and ranging, works similarly to radar. A lidar array sends out one or more laser pulses, and detects whatever object its lasers hit. That detection reveals a wealth of data, including the distance of the object from the lidar array, its color and opacity. Lidar arrays use multiple lasers shooting many times per second to gather a huge amount of environmental information.
To understand the current state of lidar development, I went to Velodyne's offices in Morgan Hill, California. Velodyne has been developing and building lidar arrays for over 10 years, getting its start with the technology in DARPA's Grand Challenges of the last decade, which initiated modern self-driving car research. If you've even seen those odd structures on top of one of Google's self-driving cars, you've seen a Velodyne lidar array.
Velodyne keeps a Ford Fusion handy for on-road testing. As a demonstration, I took a drive in this car with a couple of Velodyne engineers. On top of the car sat one of the company's HDL-32E lidar arrays, connected to a laptop in the car. As we drove down suburban streets, I watched in fascination as the laptop screen showed a real-time rendering of our surroundings, a detailed point cloud where I could see passing cars, street signs, foliage and even power lines.
Impressively, the point cloud I viewed was what Velodyne considers raw data. Process it through a computer and you can create a scene more similar to human vision.


Velodyne's smallest lidar array, which it calls the Puck, includes 16 lasers spinning to shoot their beams in 360 degrees.
Collecting these lidar-generated point clouds is what Velodyne and other self-driving car researchers call "mapping," a meaning decidedly different from traditional street maps. A lidar map is a 3D model of an environment, showing buildings, signs, curbs and any other semipermanent features. Store these lidar maps in a self-driving car, and it can compare its current sensor data to determine its precise location.
An important distinction between lidar and other sensors, such as GPS and radar, is that lidar offers distance accuracy of plus or minus 2 centimeters. The GPS in cars typically has an accuracy of about 2 meters, and gets thrown off significantly by buildings and tall trees.
Velodyne offers a unique product set in the lidar industry, as it developed spinning arrays of lasers. Instead of fixing a lot of lasers pointing in different directions, Velodyne places an array on a spindle, letting them shoot multiple times throughout their rotation to gather 360 degrees of data. At the same time, a smart detection algorithm adjusts its processing based on previous hits, creating a self-learning feedback loop.
The company's current product set includes lidar arrays with 16, 32 and 64 lasers, with up to 120 meters of range. A future model will incorporate 128 lasers, and engineers at Velodyne mentioned working toward 200 meters of range.

The black protrusion on top of this Google self-driving car hides a spinning lidar array that detects other vehicles, curbs, buildings and traffic signs.
Most importantly for use in production cars, Velodyne is looking toward bringing down the price of its products. To that end, Velodyne just announced a partnership with a company called Efficient Power Conversion to incorporate lower-cost solid-state lidar sensors in its arrays. Each of these new individual sensors measures a mere 4mm. Using Efficient Power Conversion's technology, Velodyne notes that it could bring the price of one of its arrays down to about $50, taking mass production into consideration.
Beyond price, physical design may be a limiting factor for Velodyne's lidar arrays. Dmitri Dolgov, the principal engineer on Google's self-driving car project, now called Waymo, believes that passengers in self-driving cars won't really care if there is large structure on the roof. And that placement is optimal for gathering data.
However, automakers take a more traditional approach to design, not only aesthetically but also taking into account aerodynamics. Automotive equipment supplier Delphi, for example, integrates lidar arrays at the four corners of its Audi SQ5 development vehicle, hidden under bodywork. Lidar competitors, such as Leddar Tech, offer fixed-field arrays designed for such applications. Velodyne has also shown concept packaging where its smaller lidar arrays can mount inside the bodywork at the corners of a car.

Delphi hides LiDAR arrays, along with radar modules, within the bodywork of this Audi SQ5.
With self-driving cars under development by a huge number of companies, and applications ranging from private ownership to ride-sharing to public transit, the need for lidar arrays will be an upward trend for many years.
Beyond transportation, many other industries are finding uses for lidar, from engineers inspecting dams to scientists measuring the composition of Earth's atmosphere. For the general public, however, we will likely find first-hand experience with lidar through transportation.