Underwater robot reveals the mysteries of Antarctic ice
An underwater robot has been used to produce the first detailed, high-resolution 3D maps of Antarctic sea ice.


When it comes to inhospitable environments, the Antarctic is about as harsh as it gets. For that reason, it has been extremely difficult to survey. Thanks to an underwater robot, though, the British Antarctic Survey has for the first time obtained detailed, high-res 3D maps of the sea ice, including regions that had been previously too difficult to access.
In particular, the robot -- known as SeaBED -- measured the thickness of the sea ice, which helps scientists study its changes in the context of climate change.
Usually, sea ice thickness is measured in a variety of ways: satellite observations from space, which can be misleading due to snow on the ice; and drilling, combined with visual observations from ships, which is limited due to areas of thicker ice that are harder to access.
Putting an AUV together to map the underside of sea ice is challenging from a software, navigation and acoustic communications standpoint," said engineering scientist Hanumant Singh of the Woods Hole Oceanographic Institution (WHOI), the laboratory that designed, built and operated the AUV.
"SeaBED's maneuverability and stability made it ideal for this application where we were doing detailed floe-scale mapping and deploying, as well as recovering in close-packed ice conditions. It would have been tough to do many of the missions we did, especially under the conditions we encountered, with some of the larger vehicles."
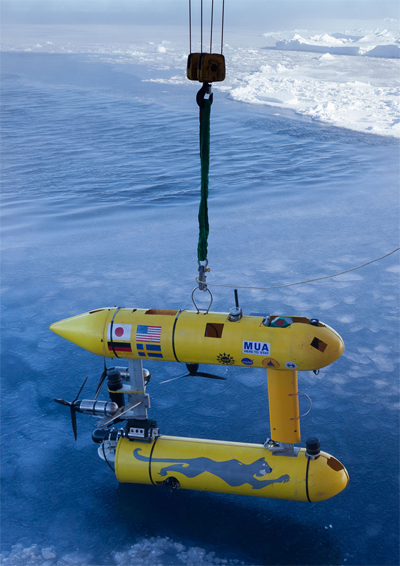
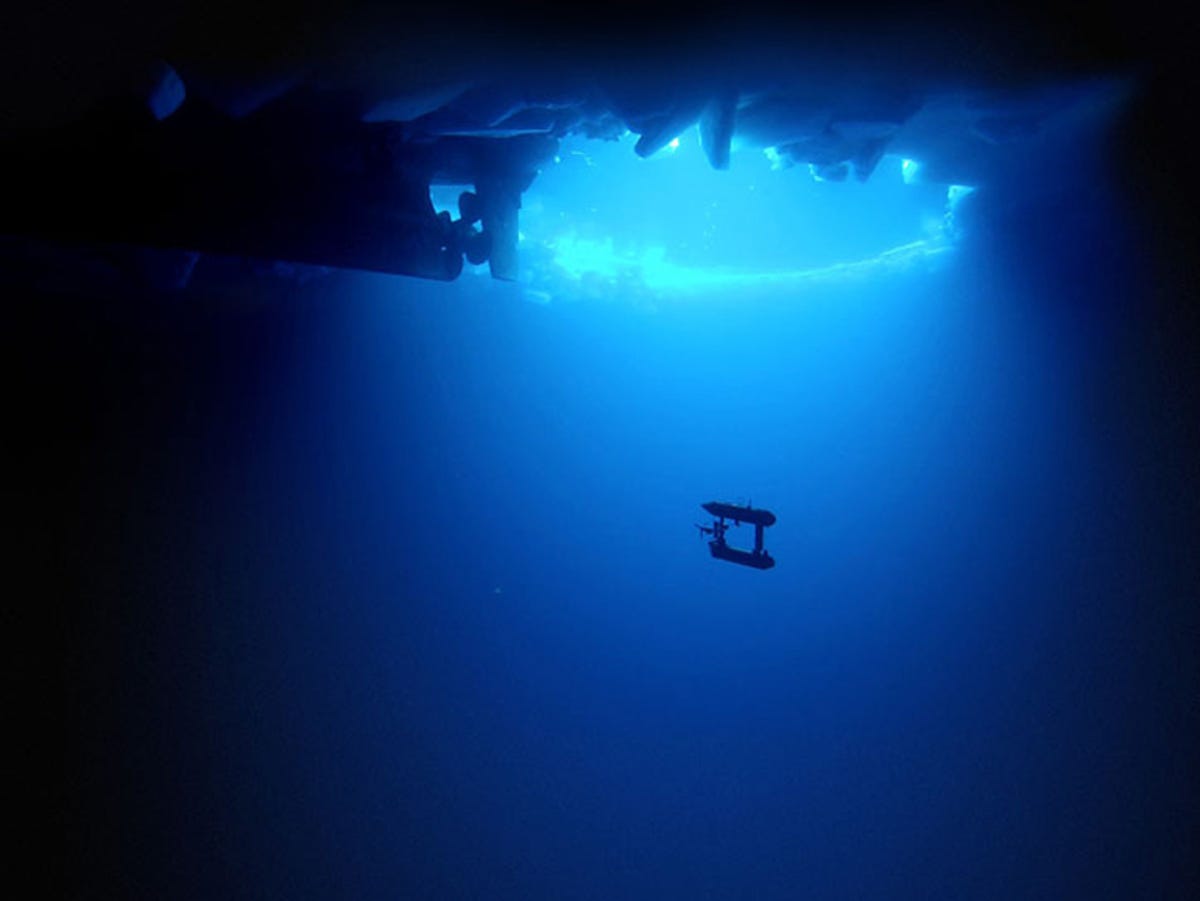
The SeaBED, measuring 2 metres long and weighing nearly 200 kilograms, is able to access those locations by travelling under the sea ice, with a twin-hull design and propeller for motion. It also has another trick up its chassis: while most oceanic survey equipment is pointed downwards at the seafloor, SeaBED is equipped with an upward-aimed sonar to survey the ice.
It was operated remotely at a depth of 20 to 30 metres, and driven in a lawnmower pattern underneath the ice, in two expeditions in 2010 and 2012 -- the former on the British Antarctic Survey's RRS James Clark Ross and the latter on the Australian icebreaker the RSV Aurora Australis. It mapped three regions -- Weddell, Bellingshausen and Wilkes Land sectors of the Antarctic Peninsula, an area of around 500,000 square metres -- around 100 football pitches.
"The full 3D topography of the underside of the ice provides a richness of new information about the structure of sea ice and the processes that created it. This is key to advancing our models, particularly in showing the differences between Arctic and Antarctic sea ice," said study co-author Dr Guy Williams from the Institute of Antarctic and Marine Science.
The next step will be large-scale surveys that can be compared to large-scale surveys taken by satellites and aircraft.
The full study, "Thick and deformed Antarctic sea ice mapped with autonomous underwater vehicles", can be found online in the journal Nature Geoscience.