This innovative robotic gripper can pick up a single grain of sand
Inspired by ancient Japanese paper art, scientists create a gripper that could give robot hands a softer, more dexterous touch.


- Third place film critic, 2021 LA Press Club National Arts & Entertainment Journalism Awards
If it's true time slips through our fingers like sand, these soft robot grippers might be able to stop the clock.
The grippers cushion objects as they grasp, allowing the pincers to handle fragile, irregularly configured and slippery items. They can also be scaled up or down to conform to a range of shapes and sizes, making them capable of picking up everything from a plastic water bottle, a rock and a large binder clip down to a tiny grain of sand.
The researchers behind the grippers, engineers from Boston University, envision a number of potential applications. Perhaps most promising, the grabbers could attach to assistive devices like robotic hands to more closely mimic human fingers. Dexterity, especially when it comes to squishy objects, has proven a challenge in the quest to create lifelike robotic appendages.
"One benefit of these structures is that a very coarse movement can result in rather fine grasping," says Douglas Holmes, a BU mechanical engineering professor and co-author of a new paper on the grippers that appears in Wednesday's issue of the journal Science Robotics.
The BU boffins found inspiration for their grippers in the ancient Japanese art of kirigami, a type of origami that permits cutting paper rather than merely folding it into shapes. While they were studying the properties of flat kirigami sheets to better understand the potential engineering applications of shape-shifting structures, a happy accident occurred.
Most kirigami sheets come on a roll, like wrapping paper. As anyone who's wrapped a present knows, gift wrap comes off its cardboard roll slightly curved. So does kirigami paper.
"For one experiment we forgot to flatten the sheet, and when we pulled on the kirigami structure, much to our surprise, it made a grasping motion," Holmes says.
That motion led the researchers to conceive of a flexible gripper made with a bendable thin elastic shell shaped like a four-petal flower and patterned with carefully positioned linear cuts like you'd see in a kirigami creation.
The pattern results in a scalable cell that can bend in 3D to pick up objects. It can function alone or be connected in a series to create kirigami gripper arrays capable of simultaneously grasping multiple delicate and slippery things.
Handy indeed.
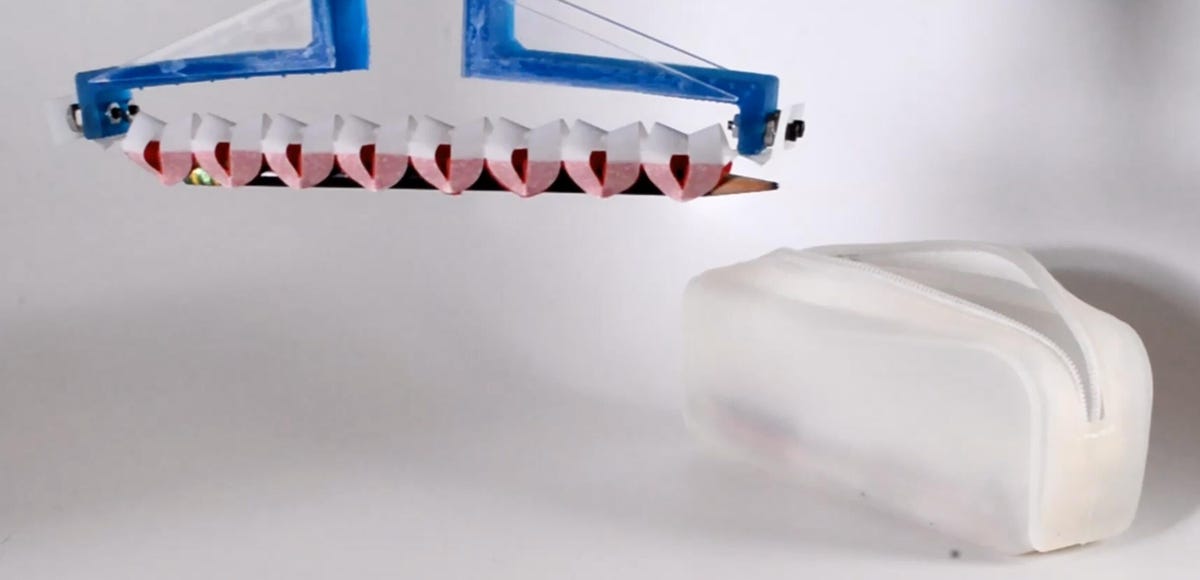
Multiple gripper units can work together as an array to pick up a long object like a pencil.