Teeny tiny robotic tentacles can grasp an ant without hurting it
Pneumatically powered tiny tentacles enable robots to grasp and handle tiny, delicate objects without damaging them.



How does a robot grasp? Most use grippers modelled on human fingers, but when it comes to manipulating tiny, delicate objects, clumsy fingers and tweezing motions may not be the best way to go, according to researchers at Iowa State University.
Led by Iowa State University associate professor of electrical and computer engineering Jaeyoun Kim, also an associate of the US Department of Energy's Ames Laboratory, the team has developed a rubbery, microrobotic tentacle that can handle even small insects without causing harm.
"Most robots use two fingers and to pick things up they have to squeeze," Kim said, "But these tentacles wrap around very gently."
The tentacles are made from tubes of a clear, flexible silicon compound called polydimethylsiloxane, measuring just eight millimetres long and around 0.2 millimetres wide. To move the tentacle, one end is sealed, and air is pumped in the other end. Combined with asymmetry in the walls of the tubes and a lump of PDMS at the tube's base, the air pressure causes the tube to curl in a multi-turn spiral motion.
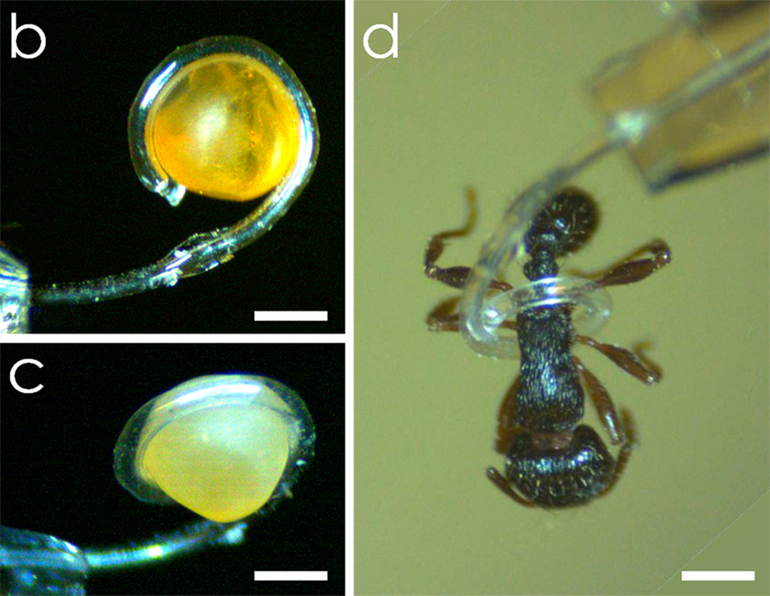
"Spiralling tentacles are widely utilised in nature for grabbing and squeezing objects," the paper, published June 11 in the journal Scientific Reports, reads.
"There have been continuous soft-robotic efforts to mimic them with pneumatic tube actuators, but the life-like, multi-turn spiralling motion has been reproduced only by centimetre-scale tentacles so far. At millimetre- and sub-millimetre scales, they could bend only up to a single-turn."
To create the tubes, the team dips a tiny cylinder in liquid PDMS, with one side coated more heavily. When it sets, the PDMS is peeled off the cylinder, creating the tubular tentacle with asymmetric wall thickness. The end is then sealed, and the lump of PDMS added to the base of the tube.
According to Kim, the tiny robotic tentacle is ideal for medical applications. It is what he describes as "S cubed" -- soft, safe and small, unable to damage delicate tissues. And it combines two of the hottest areas being explored in robotics: tiny robotics and soft robotics.
"There's microrobotics, where people want to make robots smaller and smaller. And there's soft robotics, where people don't want to make robots out of iron and steel," Kim said.
"This project is an overlap of both of those fields. I want to pioneer new work in the field with both microscale and soft robotics."