Robot can perform brain surgery through the patient's cheek
A surgical robot can perform corrective epilepsy brain surgery in a much safer and less invasive way.


For a percentage of epilepsy patients, medication is less effective at controlling seizures, or it doesn't work at all. For these patients, there is another option: brain surgery. This is usually a deeply invasive procedure, wherein the section of the patient's brain is either removed, stimulated or disconnected; afterward, recovery can take up to three months.
A robot five years in the making by researchers at Vanderbilt University may be in line to make the surgery less time consuming, less invasive and with a shorter recovery time.
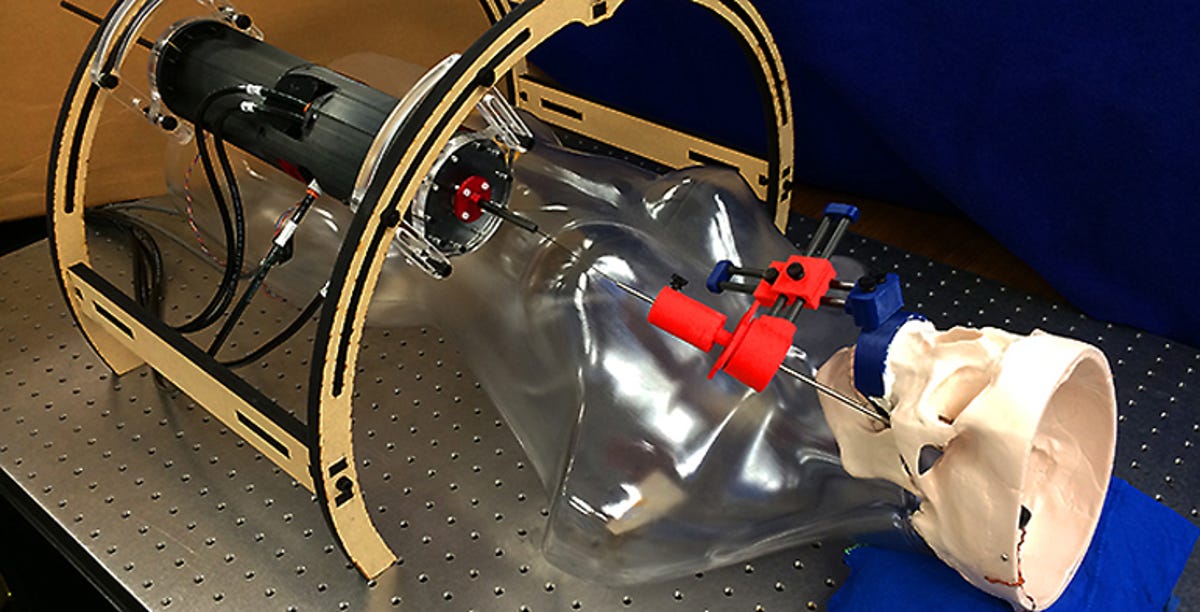
The area of the brain involved in epileptic seizures is the hippocampus, which is located in the lower regions of the brain. The surgical robot developed by mechanical engineering graduate student David Comber and mechanical engineering associate professor Eric Barth enters the brain from underneath by going through the patient's cheek, carefully negotiating gaps in the bone. This is not only a shorter route, it also avoids drilling through the skull.
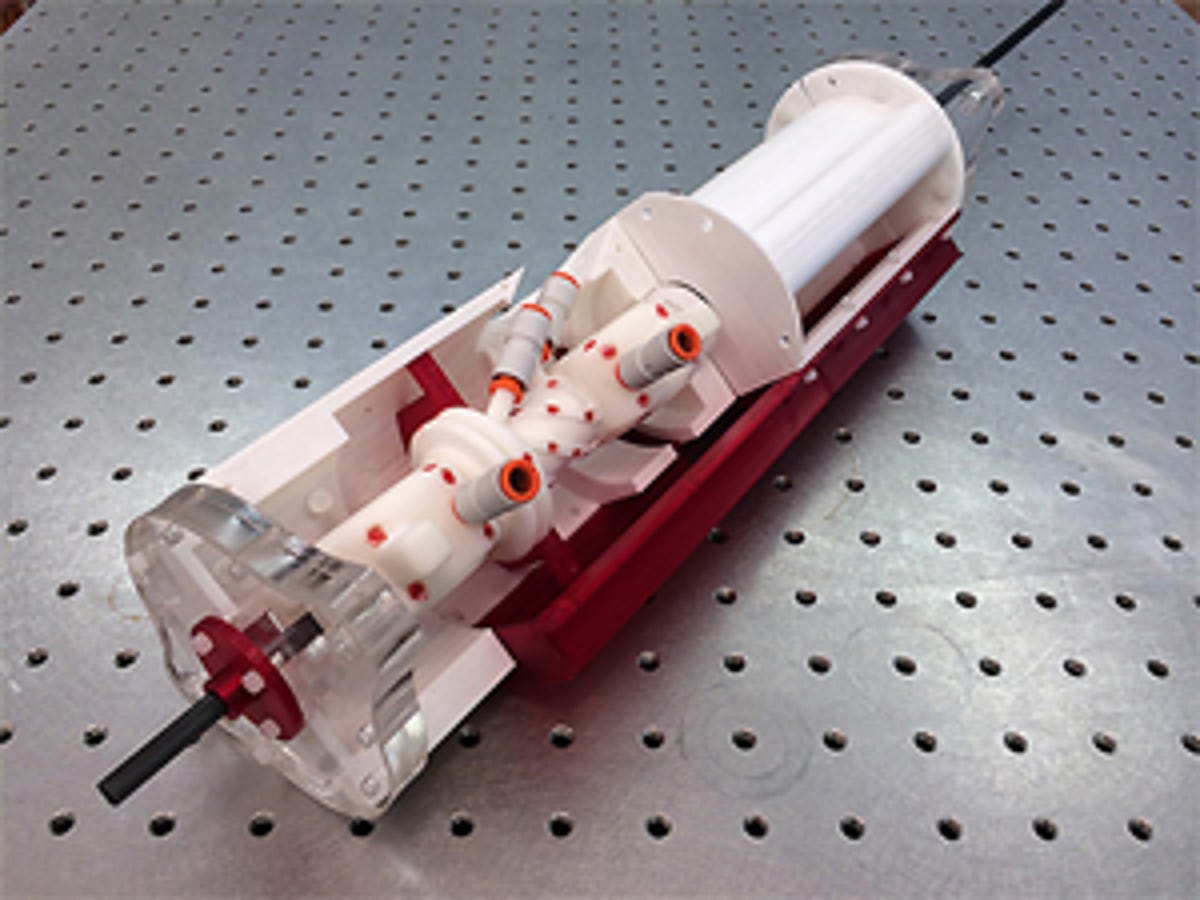
The working prototype involved the development of a shape-memory alloy needle -- that is, an alloy that can remember its original shape and return to it when heated after being deformed -- that can operate along a curving path. The robot also needed to be able to operated from inside an MRI machine, which creates a strong magnetic field.
The resultant needle is created from nickel titanium, also known as nitinol, an alloy that has both shape memory and is non-ferromagnetic, making it compatible with MRI machines. The 1.14mm needle operates like a mechanical pencil, consisting of a series of concentric tubes, some of which are curved so as to allow the tip to follow a curved path to the brain.
It is inserted in tiny, millimetre steps that allow the surgeon to track its position by taking MRI scans every step of the way, and its accuracy, the team said, is better than 1.18mm.
"I've done a lot of work in my career on the control of pneumatic systems," Barth said. "We knew we had this ability to have a robot in the MRI scanner, doing something in a way that other robots could not. Then we thought, 'What can we do that would have the highest impact?'"
At the same time, their colleague, mechanical engineering associate professor Robert Webster, had developed a system of steerable surgical needles -- which combined perfectly with the idea.
The team also collaborated with neurological surgery associate professor Joseph Neimat, who explained that the through-the-cheek method was already in use for certain procedures -- implanting electrodes to track brain activity, and identify the sites of epileptic seizure activity. However, the needles used for this are straight and therefore cannot reach the region of the brain to conduct surgery.
"The systems we have now that let us introduce probes into the brain -- they deal with straight lines and are only manually guided," Neimat said. "To have a system with a curved needle and unlimited access would make surgeries minimally invasive. We could do a dramatic surgery with nothing more than a needle stick to the cheek."
The next stage in the robot's development will be testing it on cadavers. Associate professor Barth estimates that it could be in use in operating theatres within a decade.