Flying bee robot uses an insect-inspired eye
BeeRotor is the first aerial robot that can fly over uneven terrain using visual input to stabilise -- not an accelerometer.


In order to remain upright, living creatures rely on their senses; in humans, balance is maintained using a combination of fluids in the inner ear, vision, and something called proprioception -- the body's sense of where it is in space. It's a finely tuned system -- and, like many biological systems, difficult to replicate in robots.
Instead, robots use a piece of technology called an accelerometer. This relies on the force of gravity to tell the machine where the centre of the Earth is relative to its own position; it is upright when its lower side is facing that direction. In this way, flying robots are able to stay level with the horizon, no matter how uneven the terrain, since it is not relying on topography, which is uneven, but gravity, which is even.
Although there is evidence to suggest that insects rely on gravity for orientation, they also rely very heavily on vision. It's this sight-based sense that has inspired researchers Fabien Expert and Franck Ruffierat the Aix-Marseilles University's Institut des Sciences du Mouvement Etienne-Jules Marey to build a bee-inspired aerial robot.
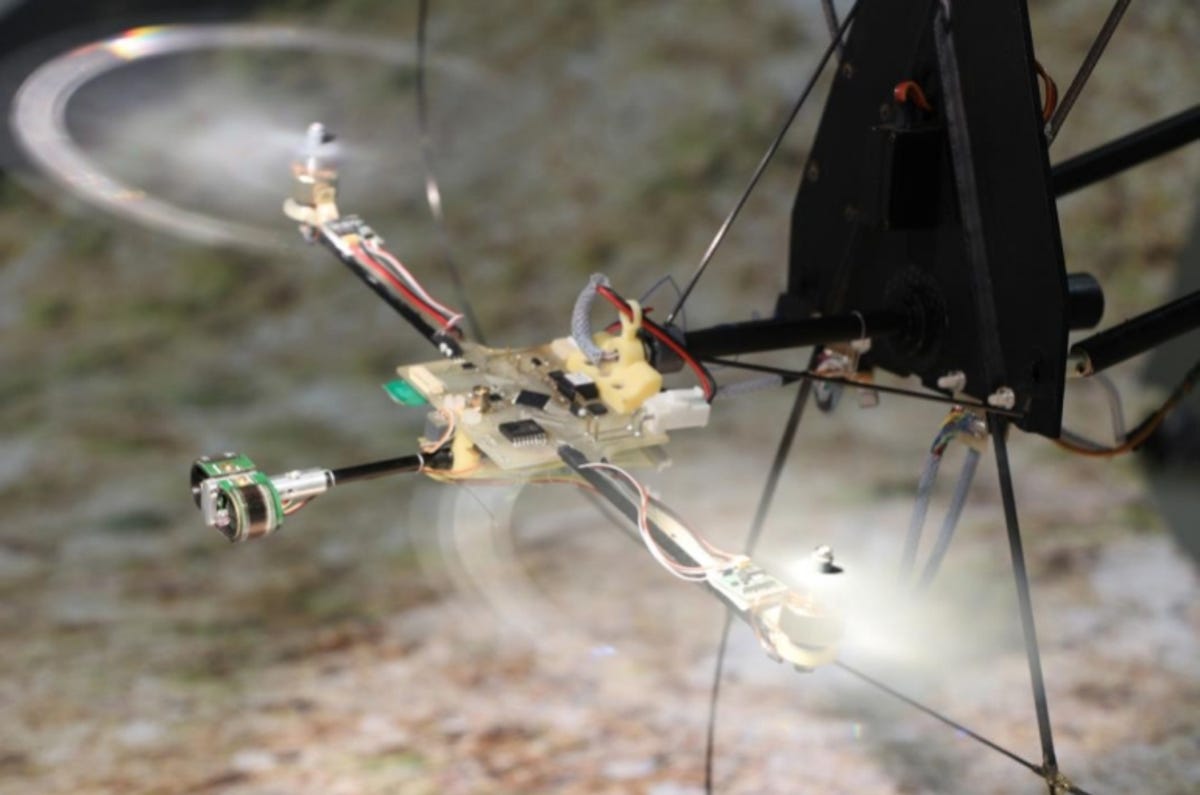
Called BeeRotor, the 80g, 47cm-long tethered robot can fly along a tunnel with uneven moving walls using just its optic flow sensors -- measuring neither speed nor altitude, but simply visually gauging its position.
Optic flow is used heavily by flying insects. As something moves through the landscape, the area in front of the moving object stays fairly stable; but, to either side, it passes by increasingly faster, reaching a maximum speed when perpendicular to the path of the object.
To replicate insects' ability to use optic flow, the researchers equipped BeeRotor with 24 photodiodes (pixels) distributed at the top and bottom of its eye, which in turn allow the robot to detect contrasts and motion in the environment around it. When the speed at which a feature of the scenery moves from one pixel to another increases, the robot is able to determine that either its speed is increasing, or its distance from that feature is decreasing.



Three feedback loops then make use of the data from the optic sensors to orient the robot. The first changes the robot's altitude in response to visual data so that it follows either the floor or the ceiling of the tunnel. The second loop controls the robot's speed in response to the size of the tunnel. The third stabilises the "eye" in response to the slope, so that it always has the best possible field of view, avoiding steeply sloping obstacles without an accelerometer.
As seen in the video below, the robot was successfully able to navigate a tunnel with moving walls, while avoiding obstacles.
The success of the experiment, the researchers believe, puts forward a plausible hypothesis explaining how insects could orient themselves without any sense of gravity -- by using a feedback loops similar to those employed by BeeRotor.
Although it's more likely that, like other animals, insects use a combination of senses to determine orientation, the research also demonstrates a new method of orientation that could act as a lightweight failsafe or complementary system to the accelerometer.
The full study, "Flying over uneven moving terrain based on optic-flow cues without any need for reference frames or accelerometers," can be found online in the journal Bioinspiration & Biomimetics.