Astronaut in space guides Earthbound robot through precision task
An astronaut aboard the space station uses a controller with force feedback to sense what a robot is touching on Earth and guide it to complete a simple job.



How long does it take an astronaut to put a round peg in a hole?
No, it's not a joke, it's something the European Space Agency (ESA) just figured out. But the peg and the hole were on Earth, while the astronaut was about 248 miles away, zipping around the planet at about 5 miles (roughly 8 kilometers) per second aboard the International Space Station.
To complete the task, astronaut Andreas Mogens used a set of controls aboard the ISS to operate a robot called the Interact Centaur rover located at an ESA center in the Netherlands. The controls used something called "force feedback" to help Mogens complete the task, which means that when the rover's robotic arm hit resistance, Mogens was able to sense it through his controls.
Making the task even more impressive is the fact that the signal between the ISS and the rover had to travel long distances in each direction.
It was beamed from the ISS to orbiting satellites, then through NASA Houston to a ground station in New Mexico. It then traveled under the Atlantic via cable to the ESA center.
The signal had to make the journey to and from the space station continuously during the experiment -- a round trip of more than 89,477 miles (144,000 kilometers). That vast distance caused a delay of about one second, but the research team was able to use software to counteract the lag and keep Mogens' movements in sync with the robot.
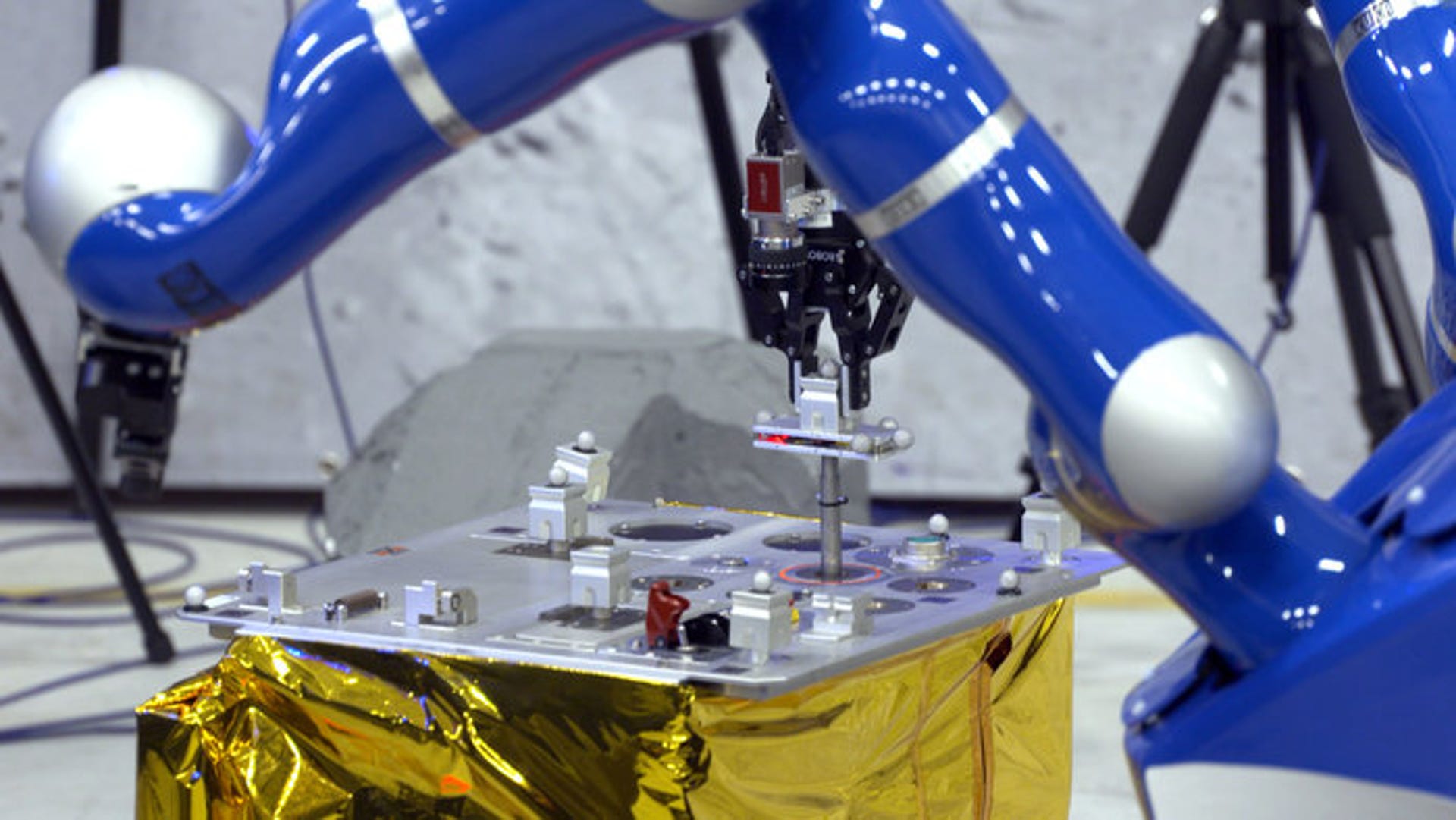
Thanks to this unique method of control, Mogens was able to guide the robot to complete its task relatively quickly. On his first try, he steered the robot to an electronics board and inserted the peg in 45 minutes. The second attempt took just 10 minutes.
"Andreas managed two complete drive, approach, park and peg-in-hole insertions, demonstrating precision force-feedback from orbit for the very first time in the history of spaceflight," André Schiele of the ESA's Telerobotics and Haptics Laboratory said in a statement.
The ESA says this experiment bodes well for future astronaut-controlled remote robotic maneuvers, which could be used for tasks like building a moonbase, manipulating rovers on the surface of Mars from orbit or removing debris -- like spent satellites -- floating around Earth.