Borrowing human reflexes eradicates robot bumbles
Researchers from MIT have designed an interface that allows a robot to tap into the reflexes of a human controller to eradicate typical robot clumsiness.




The problem with robots, or rather one of the problems with robots, is that when they do something clumsy, they don't have reflexes to correct before accidents happen. Where a human might stumble and right themselves, a robot would fall flat on its metal face. While this often leads to hilarious results for human observers, it's not exactly conducive to usefulness.
Researchers at the MIT Department of Mechanical Engineering have been working to address this literal lack of balance.
Their platform is Hermes, a humanoid disaster response robot developed by researchers led by Sangbae Kim at the Biomimetics Robotics Lab. Hermes is controlled by a human pilot who wears an exosuit. As the human pilot moves his arms and legs, so too does Hermes. So if Hermes trips on an obstacle, the human operator can react and keep the robot standing on his two feet.
This means the robot could be deployed into situations that are too dangerous for a human while still using human-like abilities.
"For humanoid robots and legged robots in general, keeping balance is critical to being able to carry out any task," said PhD student Albert Wang. "We've decided to tackle this head-on by feeding the balance sensation back to the human via forces on his waist, and that way we can take advantage of the natural reflexes and learning capability of the human to be able to keep the robot balanced."
This means that if the robot loses balance, the suit will push on the human wearer in the direction the robot is falling so that they can push back and even shift their feet in response to the loss of balance. The in-development system has shown promise, although it doesn't yet work as well as hoped.
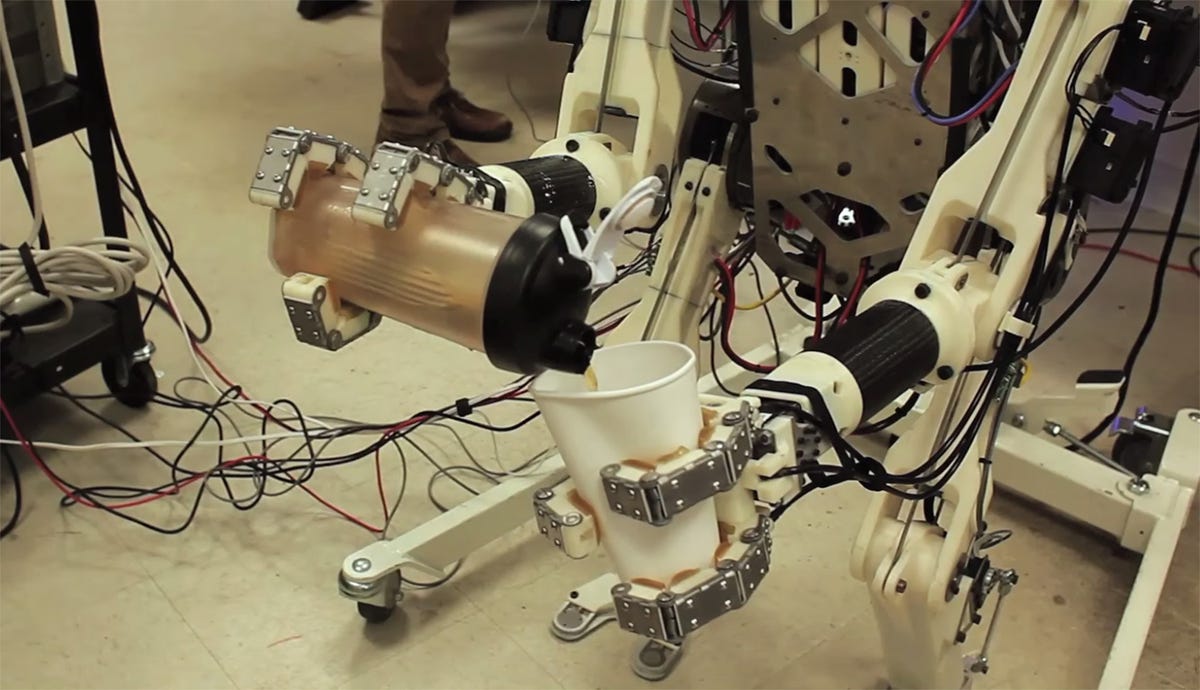
The suit provides more than just shared limb freedom and physical feedback from the robot to the human. A camera on the robot's head sends real-time visual information about the robot's surroundings to the human pilot via a headset and joysticks with buttons allow the human to control the robot's hands to grasp and manipulate objects.
The robot does have some balance sensors, and the team hopes to implement some intelligence, too, so that the robot isn't 100 percent reliant on the human operator.
"The human is still going to provide that creativity, that problem solving and that large-scale coordination to control the joints, but we've designed the robot to be stronger than a person," Wang said. "So we imagine that, in the future, we want to merge some level of autonomous control along with the human's intelligence."
The team, which consists of Wang, Kim and Joao Ramos, will be presenting their research at the 2015 International Conference on Intelligent Robots and Systems, which will take place in Hamburg, Germany from September 28 to October 2.