With a sophisticated lower-limb system that incorporates a 43-point pressure-sensor array, the iStruct humanoid and apelike robot might be the next explorer to traverse the surfaces of distant planets.
James Martin
James Martin is the Managing Editor of Photography at CNET.
His photos capture technology's impact on society - from the widening wealth gap in San Francisco, to the European refugee crisis and Rwanda's efforts to improve health care.
From the technology pioneers of Google and Facebook, photographing Apple's Steve Jobs and Tim Cook, Facebook's Mark Zuckerberg and Google's Sundar Pichai, to the most groundbreaking launches at Apple and NASA, his is a dream job for any documentary photography and journalist with a love for technology.
Exhibited widely, syndicated and reprinted thousands of times over the years, James follows the people and places behind the technology changing our world, bringing their stories and ideas to life.
With a sophisticated lower-limb system that incorporates a 43-point pressure-sensor array, the iStruct humanoid and apelike robot might be the next explorer to traverse the surfaces of distant planets.
The multilegged robot, developed by Germany's Research Center for Artificial Intelligence and the University of Bremen, shows the advantages of actuated multi-point-contact feet, using a suite of sensors to monitor precise movements of the foot and ankle structures.
The result is an advanced balance and locomotion system inspired by physiology, which gives the machine unusually natural movement. The robot can walk forward, backward, sideways, and diagonally, with smooth transitions.
2 of 6 Daniel Kühn, DFKI GmbH
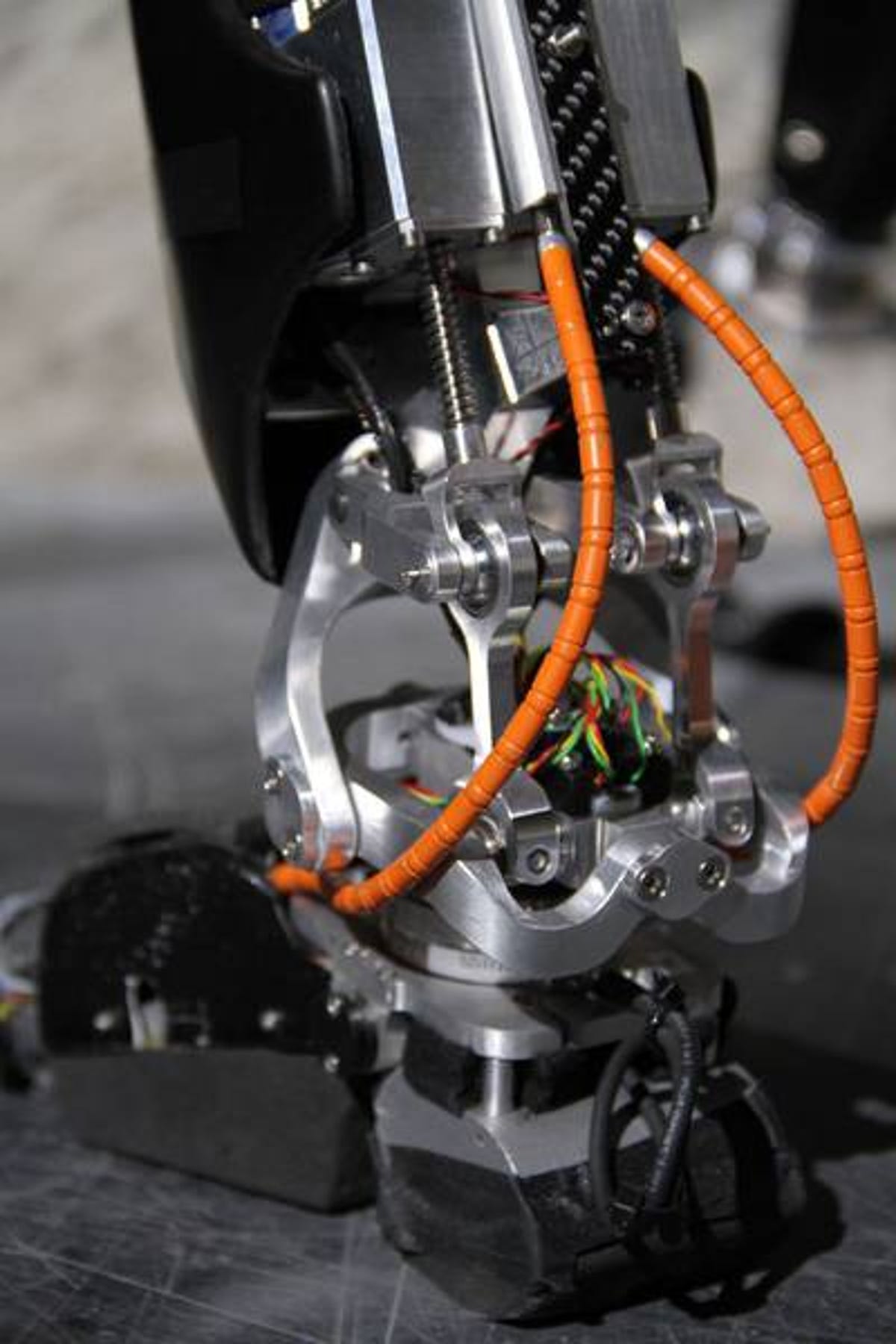
Ankle joint mechanism and sensor foot
Close-up picture of the ankle-joint mechanism and sensor foot. The dynamic walker relies heavily on the lower-limb foot-and-ankle structure for its biomechanical intelligence.
A distance sensor in the heel to anticipate the heel strike, a digital three-axis accelerometer to perceive the orientation of the foot structure, a digital magnetic angular encoder, and a bevy of other sensors monitor every moving axes of the foot and ankle structure.
3 of 6 Felix Bernhard und Kristin Fondahl, DFKI GmbH
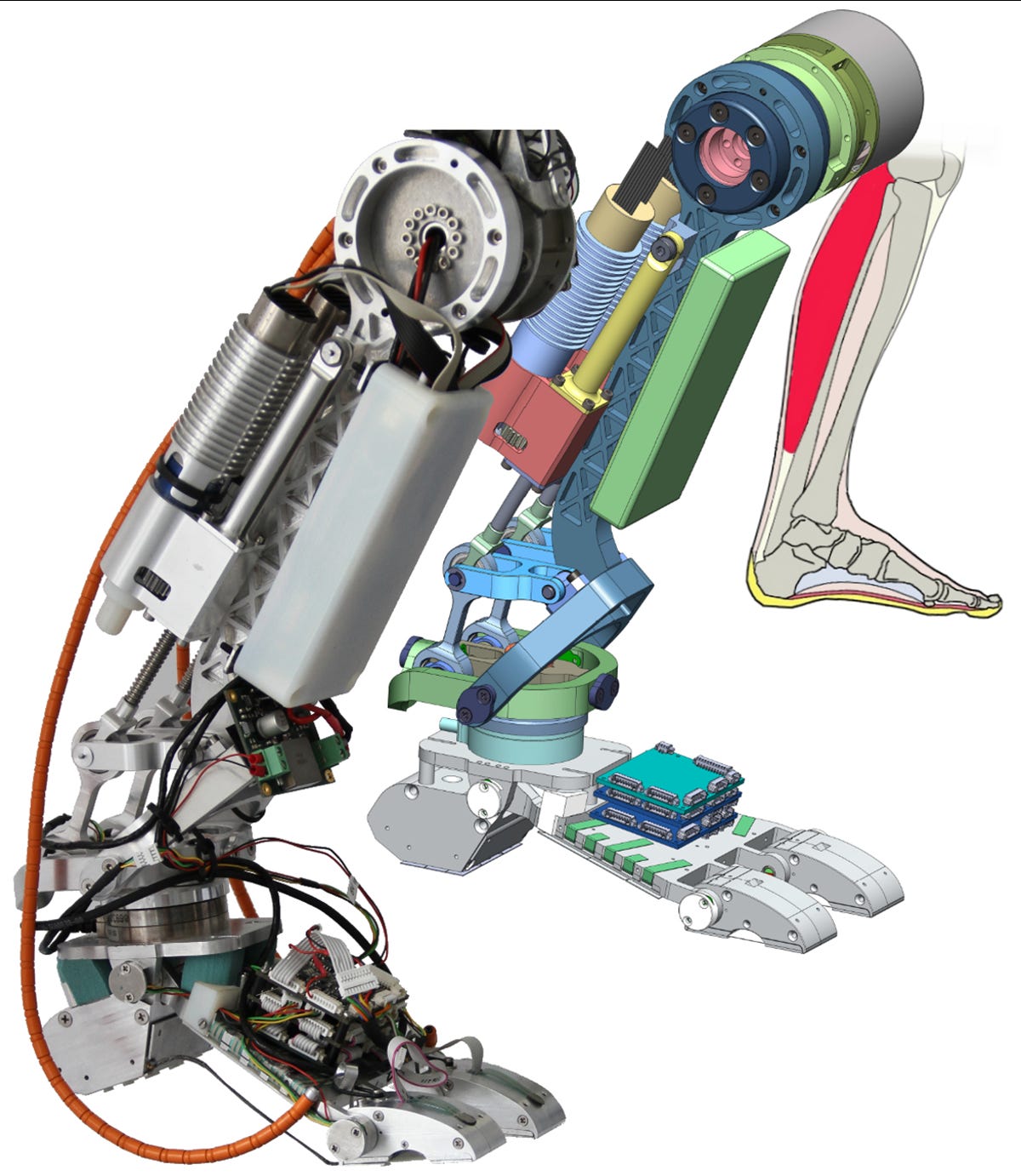
Bioinspired functionality
Developmental diagrams from the Research Center for Artificial Intelligence show the bioinspired functionality of the lower-leg design.
4 of 6 Daniel Kühn, DFKI GmbH
Artificial spine and sensor feet
Lateral view of the apelike robot, with artificial spine and sensor feet. The Robotics Innovation Center says the machine is designed as part of its "Space Robotics" research area -- projects that deal with the development of intelligent robots for extraterrestrial exploration. The efforts involve biologically inspired innovative locomotion concepts that are meant to address unstructured, uneven terrain. They're also multifunction projects involving reconfigurable systems.
5 of 6 Daniel Kühn, DFKI GmbH
A robot with a backbone
Because of the embedded electronics in the spine, the overall structure can be used as a six-axis force-torque sensor.