[MUSIC]
You see a toddler walking.
And around.
And it just seems so easy and intuitive and natural, was actually a really complex problem that evolution has evolved us to able to do what it's taken millions of years to kind Gotta get that figured out in a way that's as efficient and as robust and natural.
[MUSIC]
I foresee a day when we've got these machines reliable enough and capable enough to be meaningful partners.
There's a sense of wonderment of seeing something do actions that we're capable of doing as humans.
They're special, a little different.
[MUSIC]
[MUSIC]
[BLANK_AUDIO]
[SOUND]
[SOUND] I grew up on a farm and we had lots of land and we had motorcycles so I got into racing dirt bikes.
I love motors, moving parts.
It's part of why I became a mechanical engineer and initially I wanted to build dirt bikes and I found robotics and took that course instead.
A dirt bike is this mechanical thing that a human has to interact with.
We do similar things with our robot.
It is doing exactly what we told it to and we are just testing and it just happens to walk around.
It doesn't have feelings, but it looks natural and people won't fully understand that it is just a machine.
It is just a computer, we coded everything on it.
[MUSIC]
A bipedal robot is a robot with two legs.
Bipedals robots that have been produced really are not focused on doing real tasks.
That are useful there are just more novelties.
So this is Agility Robotics this is our main office where all of the actual engineering happens where all the design work happens.
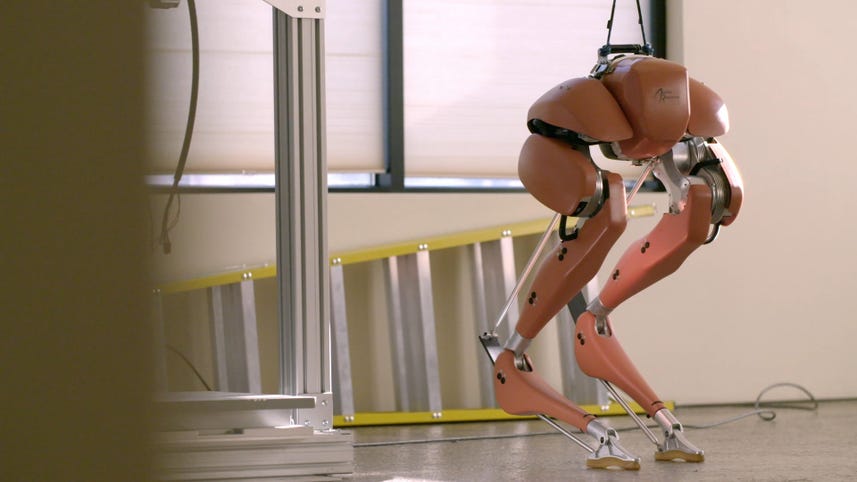
Right now there are four Cassie's this is the Cassie version three the basic robot as you can see is just kind of like a The hip pelvis with legs.
That allows us to keep the robot pretty lightweight and really do some dynamic things.
Bipedal robots are gonna help in a lot of different frontiers from space exploration to search and rescue, a lot of the more dangerous and dirty jobs that we don't want to do.
With Fukushima nuclear power plant, tsunami disaster, if all they could do was go in and turn a couple valves a lot of the consequences could have been averted.
And they asked, does anyone have a robot that can do this?
And there was kind of just a general no from the entire community.
[MUSIC]
This is our very first prototype Cassie robot that we designed and built here.
I know it kinda looks like a bird.
We didn't design it like that.
We designed it for dynamics.
It just starts to look more and more like an animal, which I think is kind of encouraging.
It's not intentional.
But it is Hinting that maybe we're getting at some of the reasons that animal legs are shaped the way that they are.
Leg locomotion is something I've been excited about for a long time.
It's hard for me to remember how I got into robotics.
I've always been interested in building things, and I've always been interested in how machines move.
My lab is focused entirely on leg locomotion on machines that walk and run.
And I say more specifically my lab is focused on understanding how walking and running works.
Certainly it's something that people have wanted to do forever, all the way back to the first sketches and drawings like Leonardo da Vinci building automatons and robots.
I say that it's only more recent that people have had some success.
We see these great examples from Boston Dynamics, we see the humanoid robotics community that's grown up.
Starting in Japan, Honda Asimo is a famous example.
Recently, we've had the DARPA Robotics Challenge where the hypotheses that Perhaps robots are almost to the point, where they're going to be useful.
It was a really good window into, what is possible right now and there were robots that were walking around, and there were robots that were very carefully considering their enviroment, walking over somewhat rough terrain, climbing up stairs, and there were robots Successfully did that, but they didn't necessarily do it quickly or well.
Certainly, any person could outperform those robots.
We designed and built Atrias.
We ultimately were able to show up at the [UNKNOWN] Robotics Challenge as a demonstrator and show Atrias walking and running, accelerating, changing its speed, going to what's something like a human's light jogging pace.
No other machine before Atrias had reproduced the human gait dynamics for walking.
Cassie is a major step forward from ATRIAS, and is very much a step on a ladder of robot prototypes and products that are gonna to keep on improving and imporving.
There's a huge amount of work to be done, a huge amount of development.
[BLANK_AUDIO]
From this point the robot is, even though it looks
Static stable like it's not doing anything.
This actually requires a fair amount of thinking.
The robot is figuring out what torque to send to each motor and what pose it should be in to maintain its balance.
And it does that so that as you push it and interact with it It actually responds and it has kinda reflex is built in.
You can see it transferring center pressure on the feet as I rock it forward and backwards.
I can kind of give it some pushes forward and backward and sideways and interact with it.
So it doesn't know that I'm actually pushing it.
That's all kind of built in reflex.
The robot is realizing from it's inner ear that it's moving forward and it shouldn't be Cassie is on the track of being able to run and jump.
Where a lot of robots, I mean, there's a reason they call it the robot dance.
A lot of robots have that more just very slow methodical design about them.
Where we're at now is more kind of like beta testing.
We see Cassie as kind of like a platform we can give to other highly capable engineers.
We have a really good relationship with the University of Michigan and we're kinda competing almost internally to see who could make the robot do cooler things.
[MUSIC]
[MUSIC]
So this mural's a little bit the history of the lab up until the Atrias series of robots that we called Marlow.
We're in the bipedal robotics laboratory at the University of Michigan.
This is where my students and I create the science of the future.
I like working on the bipedal robot just because When I see the light in people's eyes when this thing moves like a human it's magic.
So it gives you a huge sense of accomplishment.
The other thing I like about bipedal robots is the mathematics.
It is just Hard but so satisfying when you figure out some of the riddles.
So some of the stuff that's built into humans so naturally from evolution, I try to use the mechanical models of the robot.
And I realize that motors are not muscles, wiring and computers are not the same thing as neurons and brain We used a mathematics and advanced computing tools to try to extract what is this particular machine capable of doing?
Still experimental and it doesn't have all the notions of balance built in, but the mechanics are there.
[SOUND] We're putting a stereo camera on the Cassie.
It actually has two cameras, a left and a right camera.
And just kind of like human eyes, this is what allows us to see depth.
So this is going to allow Cassie to not only what's in front of it, but see how far away objects are.
At the top here, you see Cassie walking around during an experiment with a stereo camera mounted on top.
And this is kind of what you're seeing from Cassy's point of view.
On the left here is raw video footage of the camera on top of Cassy.
On the right here is what's called point cloud data.
It's a 3D representation of what Cassy is seeing.
So the colors are actually how far away objects are from Cassie, red being closest and blue or purple being furthest away.
Being able to put a camera onto Cassie opens up a whole new world of possibilites for these types of robots.
[SOUND]
There's nothing fundamentally that is any more complicated than say a mid-range motorcycle in terms of precision for manufacturing or complexity.
It's really just being able to write down the answer of how does [UNKNOWN] work?
Once we understand that it will be very much possible to make machines for reasonable price that can go in our environments where we go.
A lot of people are really concerned about robots for taking their jobs or feeling threatened by them.
Automation, computers, robotics, all these things are chaning our economies and we're gonna have to change our society and how we handle that accordingly.
Now the goal with agility is to have our robots be able to do more and more, to support the entire research community, to make hardware that is better and better every year, and aim towards that world where robots are out in the environment [SOUND] The first time we've seen it stand up.
And kinda look around, get a grasp of what it is that we've been working on all these years, to where we've gotten to now.
Usually everybody's first reaction is that they remember the bipedal robot that walked in Star Wars.
That was all supposed to be futuristic stuff but now it's the Future's here, I guess.
[LAUGHTER]
[TONE]
So a lot of people don't appreciate the complexity, because they're so used to science fiction movies, they're so used to
Just watching toddlers and animals do it so naturally, walking around, that it seems like it should be easy.
But when you really break the problem up into all of its different components, it's an incredibly complex and really difficult.
thing in order to get a robot to behave in a way that is even close to the performance, robustness, natural kind of elegance of humans walking around.
With Cassie, we will be pushing the edge, because what we want the robot to do is to perceive its environment as quickly as a human can do.
And then respond with the proper locomotor commands.
Once the robots are as capable as a human, it's gonna be an easy call when there's a fire in a building and you have to make the choice.
Do you send in a human or do you send in a robot?
If they're equally capable, you just send in the robot.
And once they're that capable, I think they're gonna start doing more and more of the task.
That we don't want to do.
Our world is built for humans, our buildings especially.
Everything is designed for a typical human form, so it makes sense to have an engineered solution similar to that.
We don't want it moving at the speed of a robot.
It's gonna be moving at the speed of life.
[MUSIC]