Google's Chris Urmson explains self-driving car crash
During a presentation at Austin's SXSW, Google's director of its self-driving car project, Chris Urmson, explained exactly what happened when one of its self-driving cars collided with a bus.



Chris Urmson took the stage at SXSW to talk about Google's self-driving car project.
Taking the stage at Austin's SXSW festival, Chris Urmson, director of Google's self-driving car project, explained precisely what happened during a recent collision between a self-driving car and a bus. He talked further about the progress of self-driving car technology and how even that incident was a crucial learning experience for the technology.
The collision occurred on February 14 between a Lexus RX 450h which Google had modified with sensors and controls to enable self-driving, and a city bus in Mountain View, California. The low-speed collision resulted in minor damage to both bus and car, but no injuries. The collision was the first caused by one of Google's self-driving cars after having covered 1.4 million miles of real world testing.
At SXSW, Urmson explained that the company had taught its cars to move next to the curb when planning a right turn, sidling by traffic stopped at a traffic light, much as human drivers do. As the car proceeded along the curb, it sensed a few sandbags on the road ahead of it, so decided to stop and wait for the lane next to it to clear.
After the light turned green, the traffic began moving. The car detected a city bus coming up the lane, and made the assumption the bus driver would slow down. As Urmson told it, the bus driver assumed the car would stay put, and kept on going. The car pulled out, hitting the side of the bus at about 2 mph.
In the wake of that collision, Urmson said his team "implemented 3,500 new tests to make sure this won't happen again."
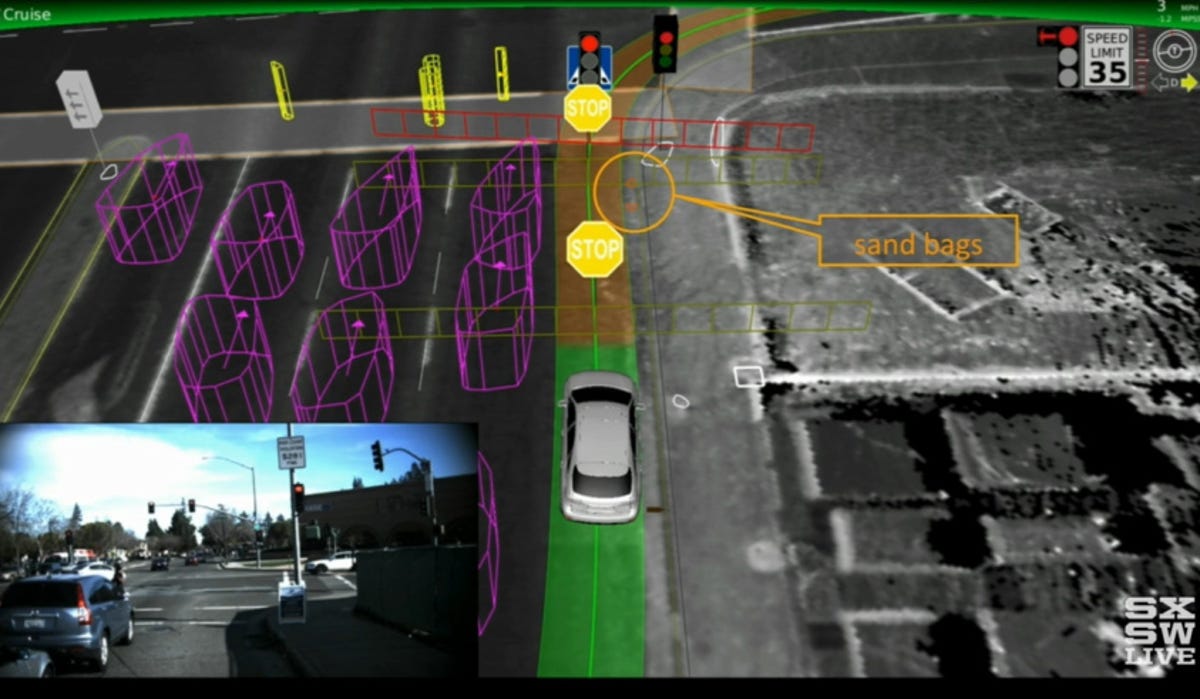

This graphic shows what Google's self-driving car "saw" through its sensors just before it collided with a city bus.
Deep learning technology is playing an important part in Google's self-driving car project, and the experience of the car involved in this collision will be transmitted to every other car in Google's fleet as a new set of driving parameters. Urmson said that all the Google cars currently self-driving on public roads are collecting experiences from real-world situations, and sharing them through deep learning technology.
The cars not only drive 10,000 miles a week, but Google also runs 3 million miles of simulation driving in a computer every day.
As a counter-example to the bus collision, Urmson pointed out a successful example of a self-driving car avoiding a more dangerous collision, where Urmson said he, as a human driver, would likely have failed. In this instance, the car, driving on a one-way street, approached a four-way intersection. Its sensors showed other traffic, including a bicyclist in the lane ahead of it and a pedestrian in one of the crosswalks. Suddenly, another bicyclist came out of a cross-street at the intersection, turning left the wrong way on the one-way street. The car recognized the danger and stopped, avoiding hitting the wrong-way bicyclist.
Urmson emphasized that the goal of Google's project is safety, an attempt to eliminate, or at least mitigate, the 1.2 million traffic deaths that happen every year around the world.