Forget GPS, Civil Maps gives self-driving cars street smarts
Silicon Valley startup Civil Maps creates detailed street-level maps of cities using vector-based graphics, letting cars determine their position based on distance to known objects.



Startup Civil Maps today announced an augmented-reality component to its 3D mapping technology, overlaying street signs and other traffic infrastructure with identifying tags generated by its deep learning technology. The system identifies objects and generates the tags to overlay on real-time video from a vehicle.
The augmented-reality component is an addition to Civil Map's localization platform, which builds maps of urban environments from and for self-driving cars.
We tend to think of maps as two-dimensional renderings giving us a god's-eye view of roads and terrain features, but Civil Maps takes a different approach. Its maps are more akin to how we understand our location when viewing street-level landmarks.
With the Civil Maps model, a self-driving car compares what its sensors perceive of the outside world, including lane markings and signage, with an internal map, and correlates that reference with GPS coordinates. If the car's sensors pick up a sign or other object not represented in its onboard map, it uploads information about the object to Civil Maps' servers. As more cars detect the object, Civil Maps can dynamically update its map model and transmit it to other cars.
Of course, Civil Maps distinguishes between what CEO Sravan Puttagunta terms "dynamic objects," meaning other cars, pedestrians and cyclists, and "pseudo-static objects," meaning traffic signs and other infrastructure.
Self-driving car technology is being developed by most major automakers and automotive equipment suppliers as well as startup companies such as Civil Maps. The intent is to eliminate the 95 percent of fatal car accidents every year that are attributable to human error.
Civil Maps, which recently announced an investment from Ford, is working on one part of the self-driving car equation, real-world positioning. While some companies bank on high-definition GPS, Puttagunta says that Civil Maps' technology allows self-driving cars to work with consumer-grade GPS. As the car compares its sensor data with its internal model, it can determine its position with a "relative accuracy of 10 centimeters," much better than the 3-meter accuracy of consumer-grade GPS. In addition, GPS signals are often disrupted by buildings in urban environments, a problem not experienced by Civil Maps technology.
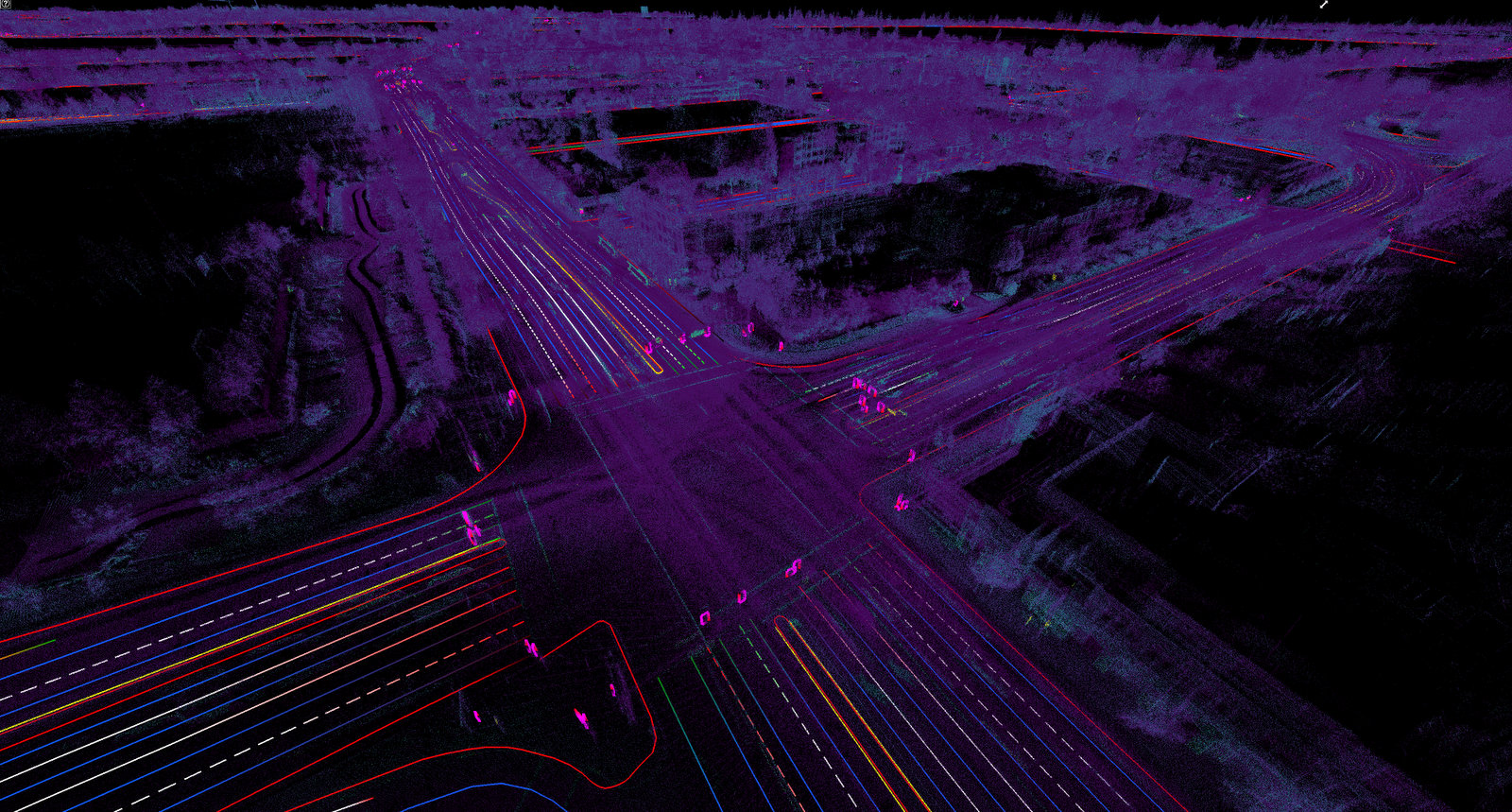
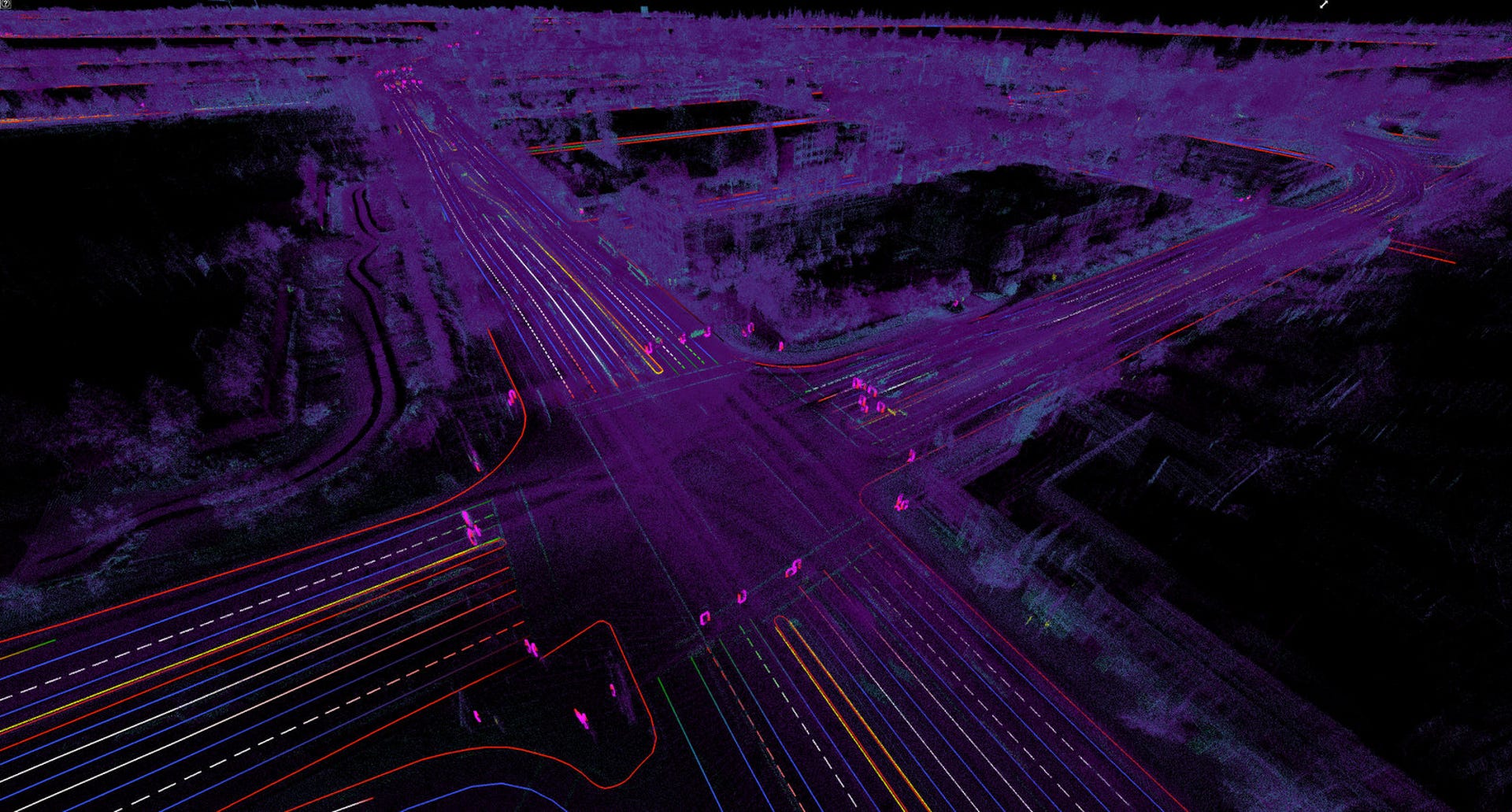
Civil Maps' technology takes this point cloud data, generated by LIDAR sensors, and converts it to a vector map.
The secret sauce behind Civil Maps' technology is what Puttagunta describes as "converting machine vision data to map vectors." LIDAR sensors on a car, which use lasers to determine distances between objects, generate what's called a point cloud. The point cloud defines all the objects around the LIDAR sensor by their three-dimensional shape. In addition, different frequencies in the laser data define different colors, such as the letters on a sign.
Civil Maps has developed a deep learning engine that identifies each object in the point cloud, differentiating a traffic light from a construction sawhorse, for example. The technology also converts the point cloud to a vector-based map, the model of the car's surroundings, and transmits any new information to a server, putting it in a queue to update a centrally maintained map of the urban area. According to Puttagunta, this process converts "10 gigabytes of raw sensor data per kilometer down to 200 kilobytes per kilometer."
Of course, self-driving cars will need separate system to identify other cars and people in the environment and make appropriate driving decisions, but Puttagunta suggests that Civil Maps' technology will at least make the decision-making easier, as the car will have a high-resolution map of drivable areas and traffic infrastructure such as stop lights.
Unlike digital map-making efforts by such companies as Here and Google, Civil Maps does not intend to send out a fleet of probe cars to gather data. Instead, Puttagunta feels that the Civil Maps model is agile enough to build its maps through crowdsourcing, gathering data from production cars equipped with sensors.
Civil Maps focuses on urban areas for its mapping because of the difficulties presented by such cluttered environments and the traffic density. Highway driving does not require such a high-resolution map.
