DARPA Robotics Challenge: Meet the contenders (pictures)
The two-day DARPA Robotics Challenge Finals event kicks off June 5. Here are the 24 robots competing in life-saving events for $2 million.



CHIMP (CMU Highly Intelligent Mobile Platform)
Tartan Rescue of Carnegie Mellon University in the US is entering CHIMP, which took third place in the 2013 DARPA Robotics Challenge Trials. CHIMP has a near-human form factor designed for hazardous environments and is fitted with a full, 360-degree sensor suite to create a 3D model of its surroundings.
CHIMP has tank-like treads instead of feet and treads on its elbows as well. It can drive on all fours for tricky terrain, and stand up on two legs when it needs to.
Year of birth: 2012
Height: 150cm (5ft)
Weight: 201kg (443lb)


HRP-2+
HRP-2+ was entered by Japan's National Institute of Industrial Science and Technology and is a member of a series of humanoid robots developed by the team. HRP-2+ boasts human-like bipedal motion over rough terrain. It has the ability to lay down and get up again, fall safely, clear a narrow passage and manipulate objects while supporting itself with one hand. A bonus: it also performs traditional Japanese dance.
HRP-2+ is the upgraded version of the original HRP-2 built in 2002.
Year of birth: 2002
Height: 170cm (5.6ft)
Weight: 65kg (143lb)

DRC-Hubo
DRC-Hubo hails from Team DRC-Hubo at the University of Las Vegas. It participated in the 2013 DARPA Robotics Challenge Miami Trials. It's a full-sized humanoid robot with two legs for bipedal locomotion and three-fingered hands for grasping.
Year of birth: 2013
Height: 175cm (5.75ft)
Weight: 80kg (176lb)

Cog-Burn
Spidery, four-legged Cog-Burn was built by Grit Robotics, a team of undergrad students, professors and engineers. The team was formerly known as Team Mojavaton when it participated in the 2005 DARPA Grand Challenge and the 2007 DARPA Urban Challenge. Cog-Burn is fitted with 34 servo motors that enable it to walk around and manipulate objects with its two arms and hands.
Year of birth: 2013
Height: 122cm (4ft)
Weight: 27kg (59lb)
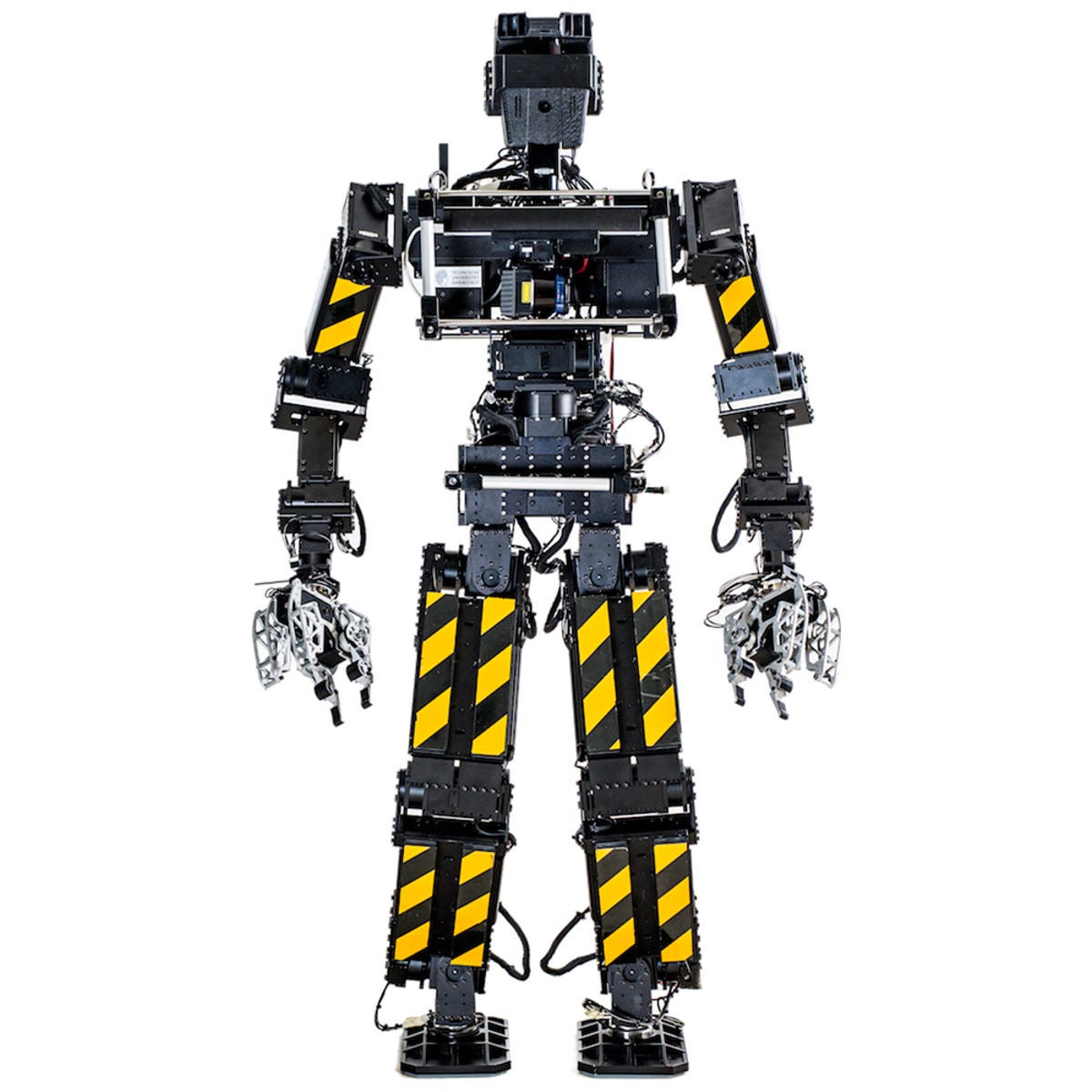
Johnny 05
Germany's Team Hector has made a bit of a nod to "Short Circuit" with Johnny 05 in name, if not in appearance. Johnny 05 has a modular design that means its components are easy to remove, repair and replace. The bipedal robot is based on software created by DRC Team ViGIR (TORC Robotics, TU Darmstadt, Virginia Tech, Oregon State University, Cornell University and Leibniz University Hanover). Johnny 05 is based on the Thormang hardware made by South Korea's Robotis.
Year of birth: 2014
Height: 147cm (4.8ft)
Weight: 55kg (121lb)

Atlas
Team HKU of Hong Kong University is entering Atlas, a bipedal robot with one very long arm. The team specialises in robot vision, motion planning, programming and control, human-machine interaction and robotic hardware. The team is entering a tetherless version of Boston Dynamics' hydraulically powered Atlas robot.
Yeah of birth: 2015
Height: 187cm (6.1ft)
Weight: 175kg (386lb)

HRP-2
Team HRP-2 Tokyo of Japan is entering the earlier version of HRP-2+, HRP-2.
Year of birth: 2003
Height: 154cm (5ft)
Weight: 60kg (132lb)
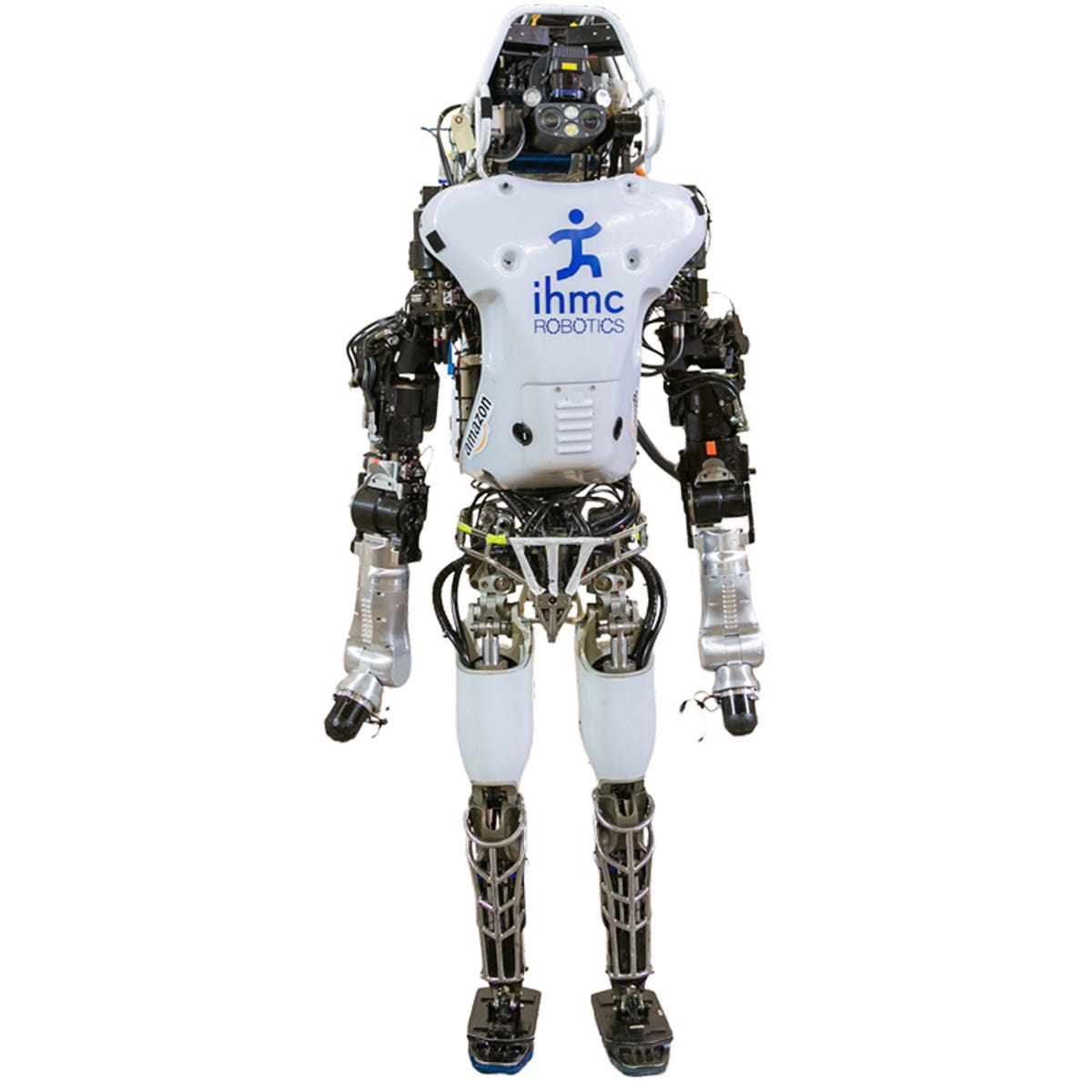
Running Man (Atlas)
Another Atlas robot comes from the Pensacola, Fla., team IHMC Robotics of the Institute of Human and Machine Cognition. The team has modified Running Man with its own software to make it faster, more robust and more efficient. The team's version of the Boston Dynamics robot has 30 degrees of freedom and third-party modular hands.
Year of birth: 2015
Height: 190cm (6.2ft)
Weight: 175kg (386lb)

DRC-HUBO
Since the rules of the competition allow robots with the same hardware to enter, so long as the software is different, there are some double-ups. Team KAIST of South Korea designed HUBO (HUmanoid RObot), which has been a project of the institute since 2002. The team is entering the latest version of the robot, and has redesigned it to be more powerful and capable. They have rewritten the walking algorithm, and the robot can also move to a kneeling position for wheeled motion, via wheels attached to its knees.
Year of birth: 2014
Height: 180cm (5.9ft)
Weight: 80kg (176lb)

Hydra
Hydra, from Team NEDO-Hydra of Japan, is a collaborative effort across four universities. The University of Tokyo developed the hardware, which has 41 points of articulation. Chiba Institute of Technology developed the sensing, localising and visualising systems. Osaka University developed locomotion and manipulation. Finally, Kobe University developed the network and teleoperation systems.
Year of birth: 2015
Height: 180cm (5.9ft)
Weight: 110kg (242lb)
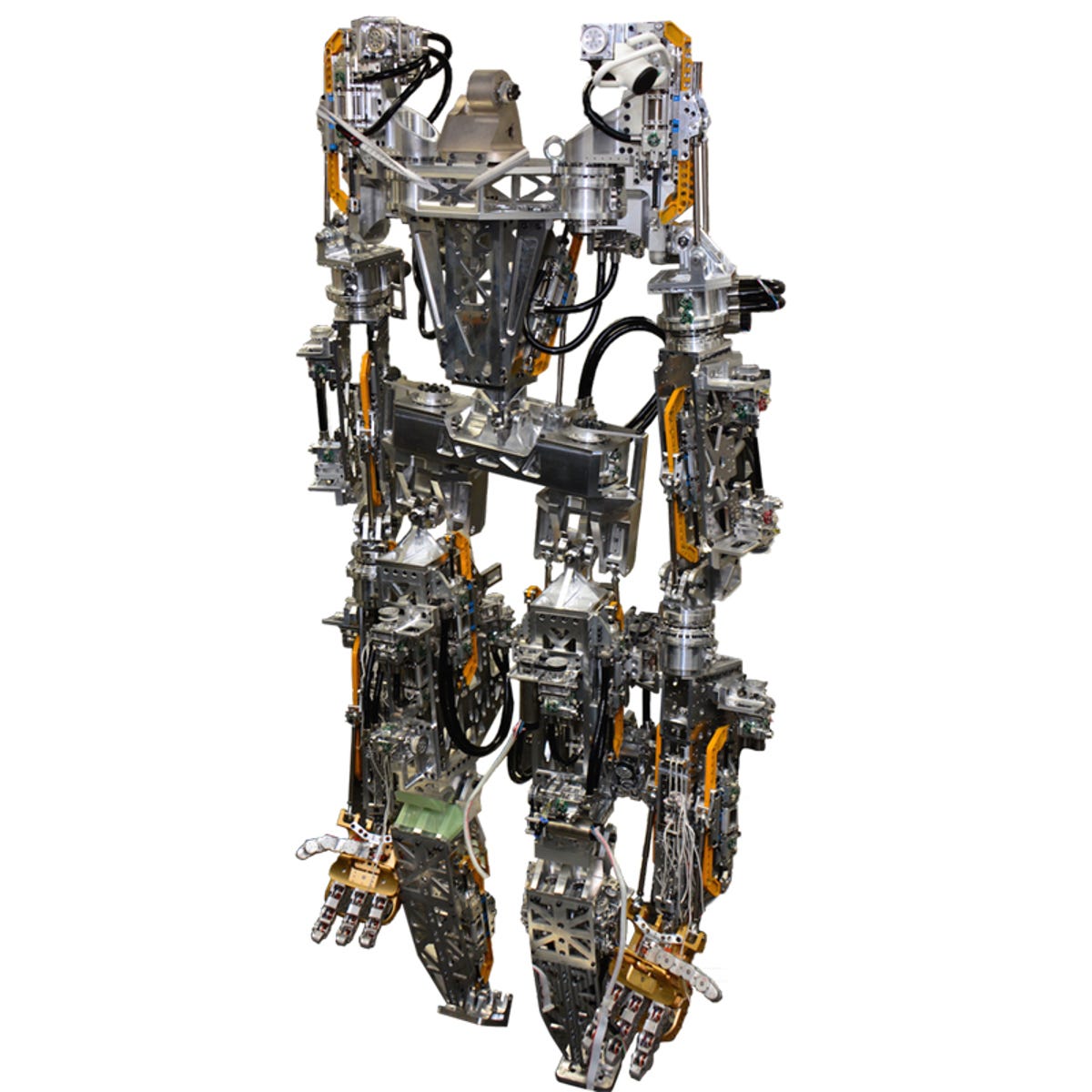
JAXON
Team NEDO-JSK of the University of Tokyo's Graduate School of Information Science and Technology presents JAXON, a humanoid robot cooled by water with a high output motor drive system.
Year of birth: 2015
Height: 188cm (6.1ft)
Weight: 110kg (242lb)

Momaro
Team NimbRo Rescue from the University of Bonn, Germany, departs from the bipedal model with the wheeled Momaro. Momaro runs on four compliant legs that end in pairs of directly driven, steerable wheels, which allows for omnidirectional driving on uneven terrain. To overcome higher obstacles, the individual legs can lift and climb. The rotating body on this base is equipped with two arms, each ending in four individually controllable fingers with two joints each. A sensor head with a rotating 3D laser scanner, eight RGB-D cameras and three full HD colour cameras allow the robot to see its surroundings in detail.
Year of birth: 2015
Height: 150cm (4.9ft)
Weight: 60kg (132lb)

RoboSimian
NASA's Jet Propulsion Labs is doing away with humanoid altogether with the RoboSimian, a modular crawling robot. It has 28 points of articulation divided among four identical legs for the purposes of simplifying design, fabrication and maintenance, but the resulting platform is dextrous and customisable.
Year of birth: 2012
Height: 70cm (2.3ft)
Weight: 125kg (275lb)

Thormang 2
South Korea's Robotis is entering Thormang 2, a faster, stronger and more stable version of the humanoid Thormang robot the team entered in the DARPA Robotics Challenge Trials.
Year of birth: 2015 for Thormang 2 and 2013 for Thormang
Height: 160cm (5.2ft)
Weight: 60kg (132lb)

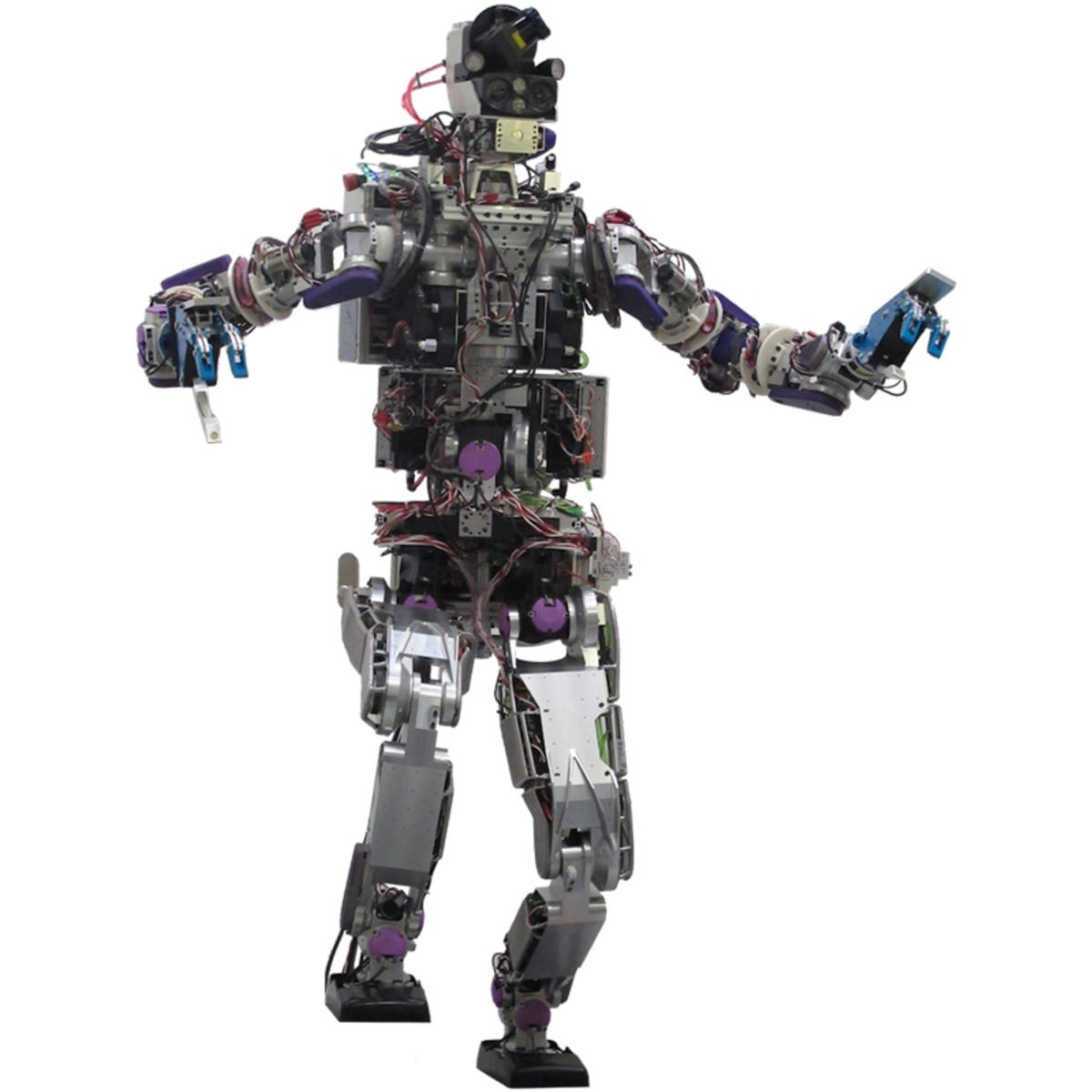
Thormang
Team SNU of South Korea has modified a Thormang with its own software, provided by three different laboratories at the Seoul National University: Dynamic Robotic Systemhttp://www.theroboticsch...s Lab wrote the control algorithms, Machine Intelligence & Pattern Analysis Lab wrote the perception software and private company SimLab provided the software framework and interface.
Year of birth: 2014
Height: 140cm (4.6ft)
Weight: 60kg (132lb)

THOR-RD
Team THOR is a collaboration between the Robots and Mechanisms Lab (RoMeLa) at the University of California, Los Angeles, and the General Robotics, Automation, Sensing and Perception Lab (GRASP) at the University of Pennsylvania. They're entering THOR-RD, a robot designed around the concept of user-friendliness. The humanoid robot is therefore built with modular actuators and simple mechanical structures for ease of transport, deployment, operation and maintenance.
Year of birth: 2014
Height: 150cm (4.9ft)
Weight: 54kg (119lb)

Hercules (Atlas)
Team TRACLabs of Houston, Texas is advancing to the finals with DARPA funding -- the only small business team, it claims, to do so. It is entering a modified version of Boston Dynamics' Atlas called Hercules.
Year of Birth: 2013
Height: 190cm (6.2ft)
Weight: 180kg (397lb)

LEO (Atlas)
Lockheed Martin's Team Trooper, including teammates from the University of Pennsylvania and Rensselaer Polytechnic Institute, is entering LEO, a Boston Dynamics Atlas robot that is designed to work autonomously, contacting a human operator only when it requires assistance.
Year of birth: 2015
Height: 190cm (6.2ft)
Weight: 180kg (397lb)

Escher
Escher is a robot wholly designed, fabricated and assembled by Team VALOR, a team of engineering students at Virginia Tech. Because it is lightweight for its size, it can operate untethered for up to two hours. It features a multi-spectral sensor suite for surveying its environment, and a perception system allows it to identify obstacles and tools, which in turn allows the bipedal robot to operate semi-autonomously.
Year of birth: 2015
Height: 182cm (5.9ft)
Weight: 80kg (176lb)

Florian (Atlas)
Team ViGIR is a collaborative US-German effort, made up of researchers from researchers from TORC Robotics, Technische Universität Darmstadt, Virginia Tech, Oregon State University, Cornell University and Leibniz University Hanover. The Atlas robot submitted by the team, Florian, is named for the patron saint of firefighters. The team has focused on software -- creating control concepts that allow human operators to direct the robot under constrained conditions.
Year of birth: 2013
Height: 193cm (6.3ft)
Weight: 160kg (353lb)

WALK-MAN
Developed by Team WALK-MAN from the Italian Institute of Technology and the University of Pisa, WALK-MAN is a humanoid robot with 33 points of articulation that can operate under the power of a 2KWh battery unit. It's fitted with a robot perception system and protective soft covers that are designed to shield the robot from impacts in hazardous situations.
Year of birth: 2015
Height: 185cm (6ft)
Weight: 120kg (264lb)

Warner (Atlas)
Worcester Polytechnic Institute and Carnegie Mellon University have teamed up for Team WPI-CMU, entering an Atlas robot named Warner. The team is made up of undergraduate students, graduate students, professors and engineers, with a variety of expertise in robot perception, locomotion and balance, project management and software engineering.
Year of birth: 2013
Height: 190cm (6.2ft)
Weight: 180kg (397lb)
Editor's note: The DARPA Robotics Challenge Finals were originally intended to have 25 entries. Team Intelligent Pioneer from China withdrew its entry, Xing Tian.
You can follow the Finals on the DARPA Robotics Challenge website.
More Galleries

My Favorite Shots From the Galaxy S24 Ultra's Camera
20 Photos
Honor's Magic V2 Foldable Is Lighter Than Samsung's Galaxy S24 Ultra
10 Photos
The Samsung Galaxy S24 and S24 Plus Looks Sweet in Aluminum
23 Photos
Samsung's Galaxy S24 Ultra Now Has a Titanium Design
23 Photos
I Took 600+ Photos With the iPhone 15 Pro and Pro Max. Look at My Favorites
34 Photos
