Two years after its last Grand Challenge, the U.S. government's Defense Advance Research Projects Agency is gearing up to host the Urban Challenge, a race between autonomous, driverless cars through a simulated urban environment at George Airforce Base in Victorville, Calif. Thirty-five vehicles will compete in the National Qualifying Event semifinals between October 26 and 31, with 20 vehicles going on to compete in the final race on November 3. Here is a roundup of some of the contenders.
Both the semifinal and the final of the 2007 Urban Challenge will take place at George Air Force base in Victorville, Calif. None of the teams is permitted to visit the site prior to October 24, and the teams will be given details of the route only 5 minutes before the start of the race. All vehicles will be required to perform mock military supply missions, which involve merging into moving traffic, navigating traffic circles, negotiating busy intersections, and avoiding obstacles. Teams have up to 6 hours to complete the 60-mile course.
2 of 15 Cornell
Cornell University's Chevy Tahoe robot will make use of "probabilistic inference algorithms" along with GPS to negotiate the Urban Challenge course. With half a million dollars in funding from DARPA itself, Team Cornell has a financial edge over many of the teams in the race. It also has the advantage of having most of its team intact from the 2005 Grand Challenge.
3 of 15 CNET Networks
The California Institute of Technology is entering the Urban Challenge with Alice, a heavily modified--and fortified--Ford E-350. Alice is reinforced with armor plating to ensure that it can withstand a collision from other cars on the course (according to DARPA rules, cars that hit another vehicle are automatically disqualified, but victims of collisions get to continue the race after being repaired).
4 of 15 CNET Networks
The Stanford University team that won the 2005 Urban Challenge with a Volkswagen Touareg is back with another VW for the Urban Challenge. The modified stock Passat--called Junior--is more advanced than Stanley as it uses more sophisticated cameras to get a 360-degree view of its surroundings. Another addition for 2007 is lidar (light detection and ranging), which is used to gauge the distance to obstacles. Junior is sponsored by Google and Intel and is one of the favorites to take home the event's $2 million cash prize.
5 of 15 Team Ben Franklin Racing
The Philadelphia-based Ben Franklin team is a collaboration of students from the University of Pennsylvania and Lehigh University with some help from aerospace manufacturer Lockheed Martin. The team's vehicle--called Little Ben--is a modified Toyota Prius, which can make use of the increased capacity of the car's hybrid battery to power its onboard electronics.
6 of 15 Team AnnieWay
One of four German teams to make it to the semifinals, Team AnnieWay will be using another Volkswagen Passat, which, like Stanford's Junior, makes use of a Velodyne 3D, 360-degree lidar. A spin-off of the German Research Foundation's Collaborative Research Center on Cognitive Automobiles, the team is made up of researchers from the University of Karlsruhe, the TU Munich, the Fraunhofer-Gesellschaft (IITB in Karlsruhe), as well as the Universitaet der Bundeswehr Munich.
7 of 15 Team Berlin
As its name suggests, Team Berlin hails from the German capital and will be entering a modified Dodge Grand Caravan in this year's Urban Challenge. The car was originally adapted for a handicapped driver, but has since received more substantial modifications in the form of a series of outdoor laser scanners, two cameras, a GPS system, and an IBM blade server. Seed money for the project was provided by the Freie Universitat Berlin after Berlin police expressed interest in developing an autonomous robot for patrolling warehouses and enclosed areas.
8 of 15 MIT
The Massachusetts Institute of Technology enters the fray this year with a Land Rover LR3 donated by Ford. For its first venture into robotic racing, MIT is drawing on some proven technologies from previous DARPA events, including an Electronic Mobility Controls drive-by-wire system, which Team Gray used in its 2005 Grand Challenge vehicle. According to its Web site, the MIT team sees the event in terms of three major challenges: input, i.e., the relationship of the provided environment and mission descriptions to the actual driving environment; sensing, i.e., the relationship of available sensor data to the actual static and dynamic surroundings of the vehicle; and actuation, i.e., the relationship between commanded vehicle motions and the vehicle's actual physical progress.
9 of 15 CNET Networks
It's hard to believe, but Team Oshkosh's entrant into the 2007 Urban Challenge is actually smaller than the vehicle it used in the 2005 Grand Challenge. Named after its six-wheeler predecessor, this year's military-grade 4x4 is named TerraMax, and features rear-wheel steering to better suit it to urban agility. The Oshkosh truck relies on software from Teledyne Scientific Co. and sensors from Auburn University.
10 of 15 Tartan Racing
Carnegie Mellon's team will be looking for revenge in the Urban Challenge after losing out to Stanford in 2005. Widely considered to be the favorite for this year's event, the CMU team--named Tartan Racing--will be entering Boss, a Chevy Tahoe modified by the university's renowned Robotics Institute under the direction of team leader Red Whittaker. According to the Tartan Racing Web site, "Boss uses perception, planning and behavioral software to reason about traffic and take appropriate actions while proceeding safely to a destination."
11 of 15 Sting Racing
The sweetest ride of the 2007 DARPA Urban Challenge has to be Sting1, a modified Porsche Cayenne rigged up with GPS, vision, radar and laser sensors. While this is Georgia Tech's first foray into DARPA events, SAIC has competed in two previous events. The team is assisted by input from Duke University and Sun Microsystems.
12 of 15 Team CajunBot
Based at the University of Louisiana at Lafayette, Team CajunBot has raced in the two previous DARPA Challenge events. This year it brings a new vehicle to the race in the form of RajinBot, a modified Jeep Wrangler. Team CajunBot's 11 core members consider the race more of a software-engineering challenge than a mechanical- or electrical-engineering problem. The team's sponsors include Hewlett-Packard and sensor-maker Ibeo.
13 of 15 Team Gray
Another veteran of the 2005 Grand Challenge, Team Gray (previously Gray Team) is using a modified Ford Escape Hybrid named PlanB for this year's event. Along with the requisite onboard sensors and cameras, PlanB features a solar panels on its roof to provide alternate power for the electrical system. Team Gray is privately funded by Gray Insurance and is made up of members of the company's computer department as well as students from Tulane University.
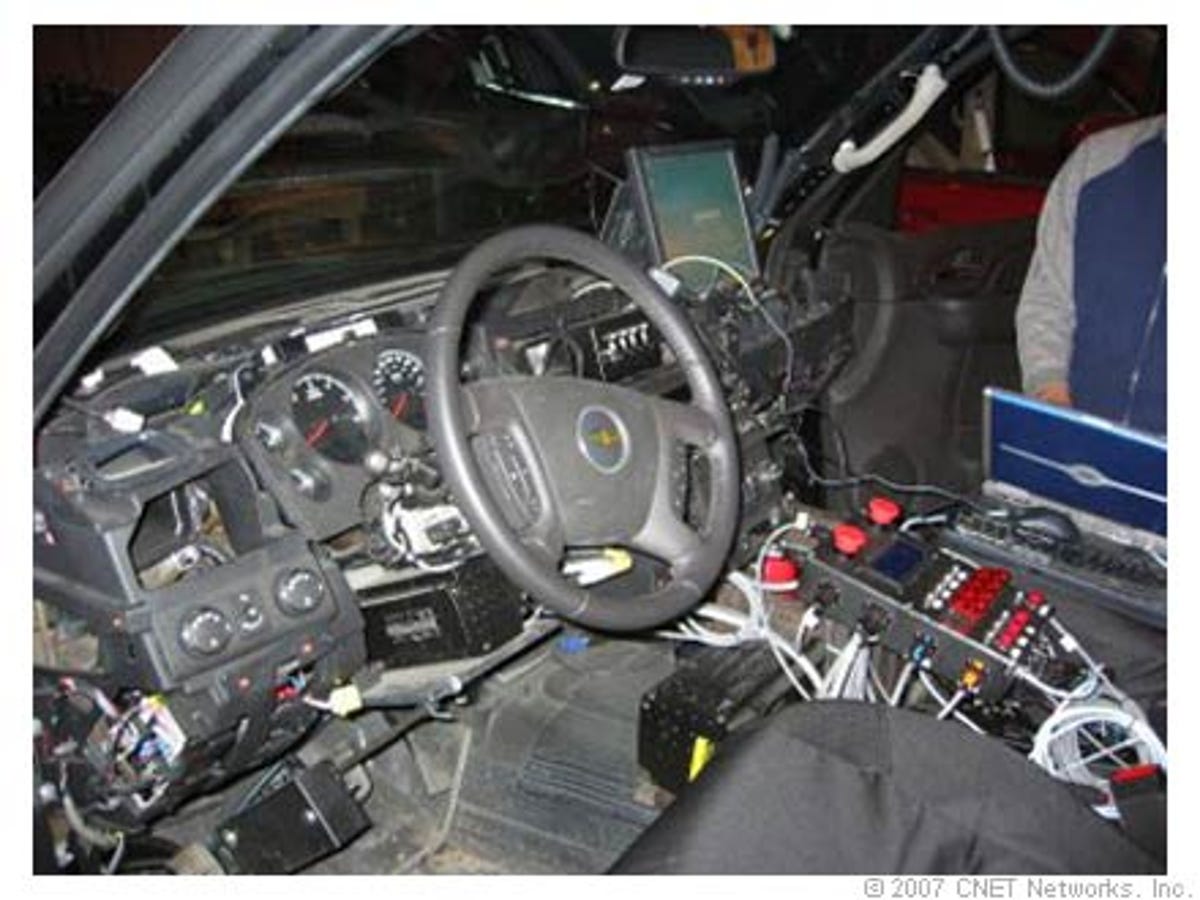
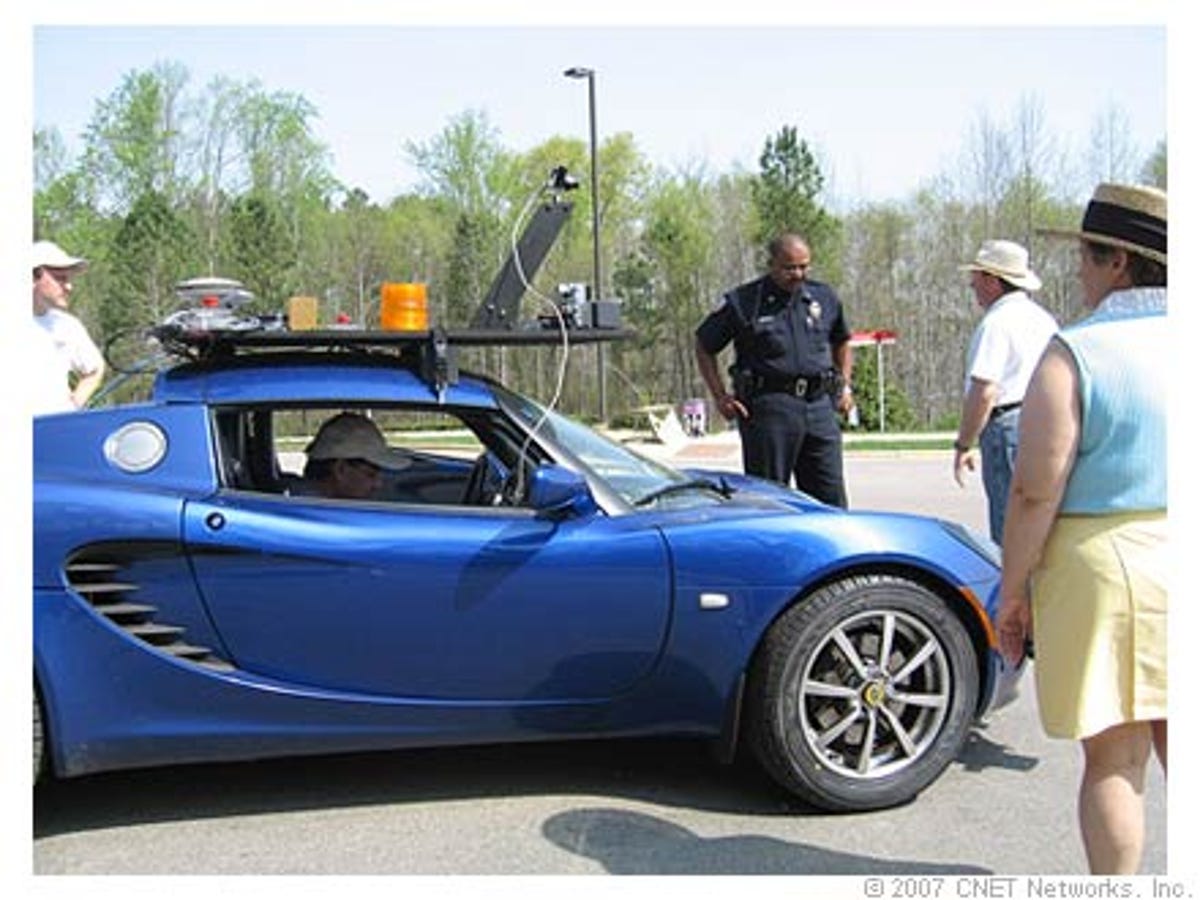
14 of 15 Insight Racing
Taking the driver out of a Lotus Elise may seem like a crime against automotive enjoyment, but that is what North Carolina-based Insight Racing is doing with Lone Wolf, its fully autonomous two-seater. The team is sponsored by North Carolina State University and local businesses, and was a participant in the 2005 Grand Challenge. Lone Wolf relies on laser sensors from Sick. The data from which is analyzed in real time by Comtrol's DeviceMaster, enabling the car to navigate obstacles and maneuver in traffic.
15 of 15 Team AvantGuardium
A collaboration between U.S. and Israeli defense technology groups, Team AvantGuardium is led by Florida-based EFW and includes several subsidiaries of Israel-based Elbit systems. The team's vehicle, Ronin, is a modified Jeep Wrangler. AvantGuardiam says it focused on four key factors when designing the autonomous vehicle: vehicle control system; the navigation system; obstacle detection and avoidance; and rules and event-based decision making.