From living rooms to battlefields at iRobot (photos)
Road Trip 2010: For years, iRobot has helped soldiers and homemakers alike and is now planning for the future of both.



Cool Stuff
BEDFORD, Mass.--If your entire experience with iRobot is a Roomba, you should know that that cute vacuum cleaning robot, while iRobot's signature product, is just the tip of the iceberg.
Actually, though, it is better known in some circles for its military robots, including the PackBot and the SUGV, both small ground-based robots designed to go into combat situations in search of explosives, or to do search and rescue operations.
But now, iRobot is looking down the line, in both the military and home realms--seeing autonomous robots as the future of its military line, and care-providing robots as its best chance to make a difference in the home down the line.
Either way, the company is intent on making a difference in the markets it serves and, as the words emblazoned on the doors to its corporate headquarters here indicate, make "Cool Stuff."
As part of Road Trip 2010, CNET reporter Daniel Terdiman stopped in at iRobot and got a look at the company's past and its future.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.
Colin's first robot
iRobot was founded by its CEO, Colin Angle, a graduate of MIT. While Angle would go on to create much more complicated robots--and entire company around his work and research--he started small, with this little device.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Section of Chemical Bot
Though it is still in the very earliest stages of research, this could be the future of robotics. This is a section of what is known as a Chemical Robot, a nonmechanical device that, in concept, at least, is designed to be able to expand and deflate on demand and therefore to be able to squeeze through very small spaces and perhaps even under doors. It's too early to tell how this will be productized, however.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

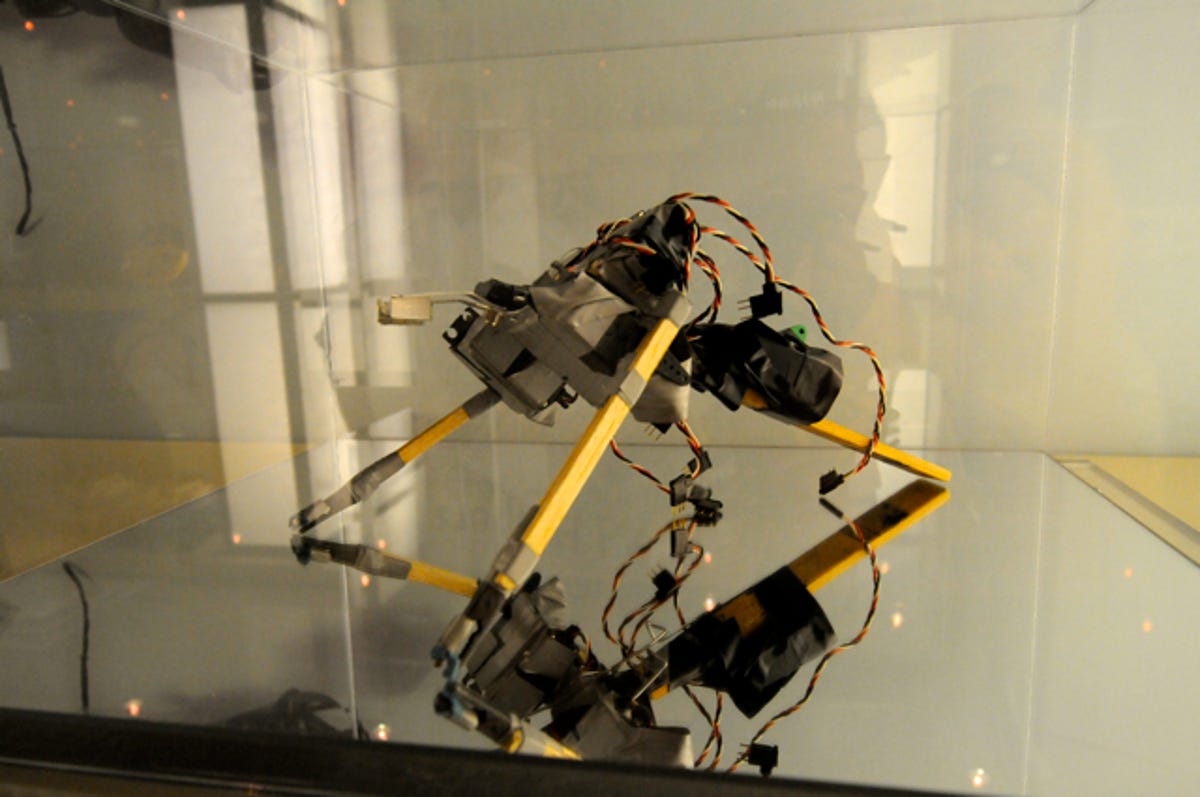
ChemicalBot
A full-size Chemical Robot prototype. For now, this type of device is controlled via the wires that protrude from it, but eventually, the hope is that it can be controlled wirelessly or be autonomous. It is designed with the idea that it should be able to crawl under doors or through the tightest holes. But iRobot says it is a long way off from being productized and for now, is just in the earliest what-if concept stage.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.
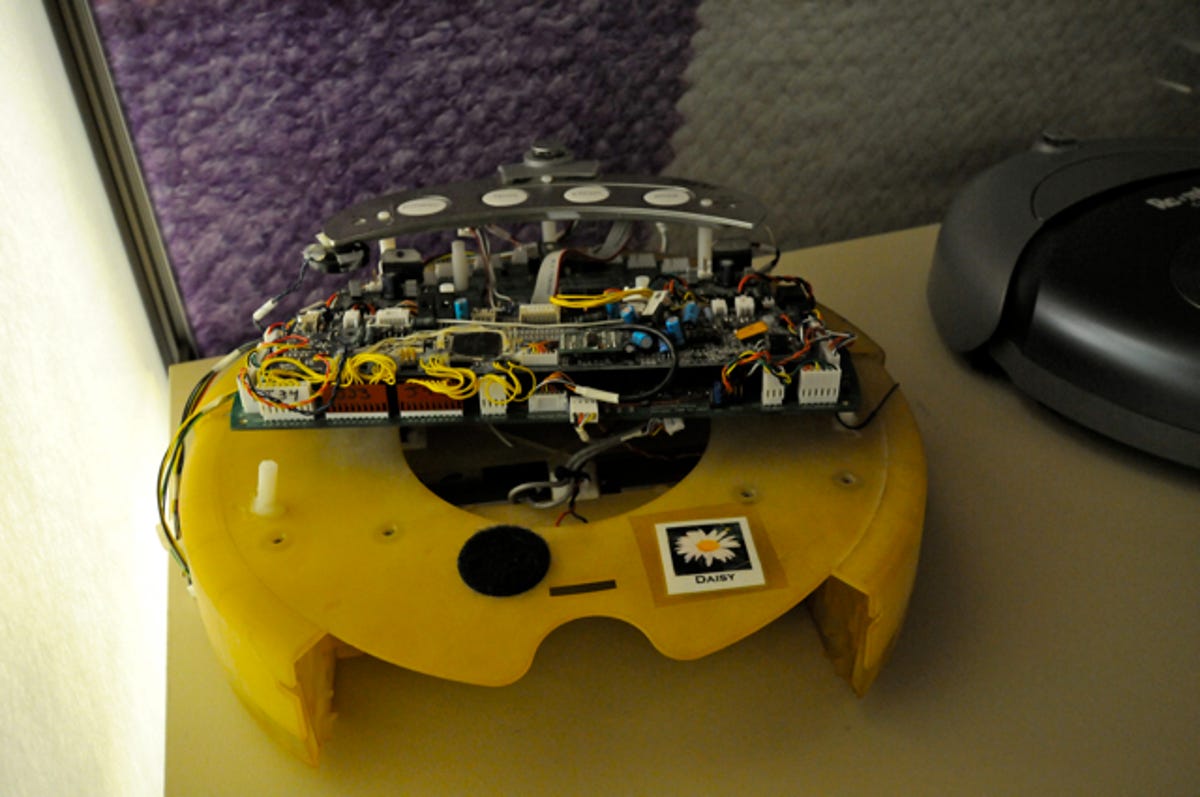
Daisy
This is Daisy, one of the very earliest Roomba prototypes.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.
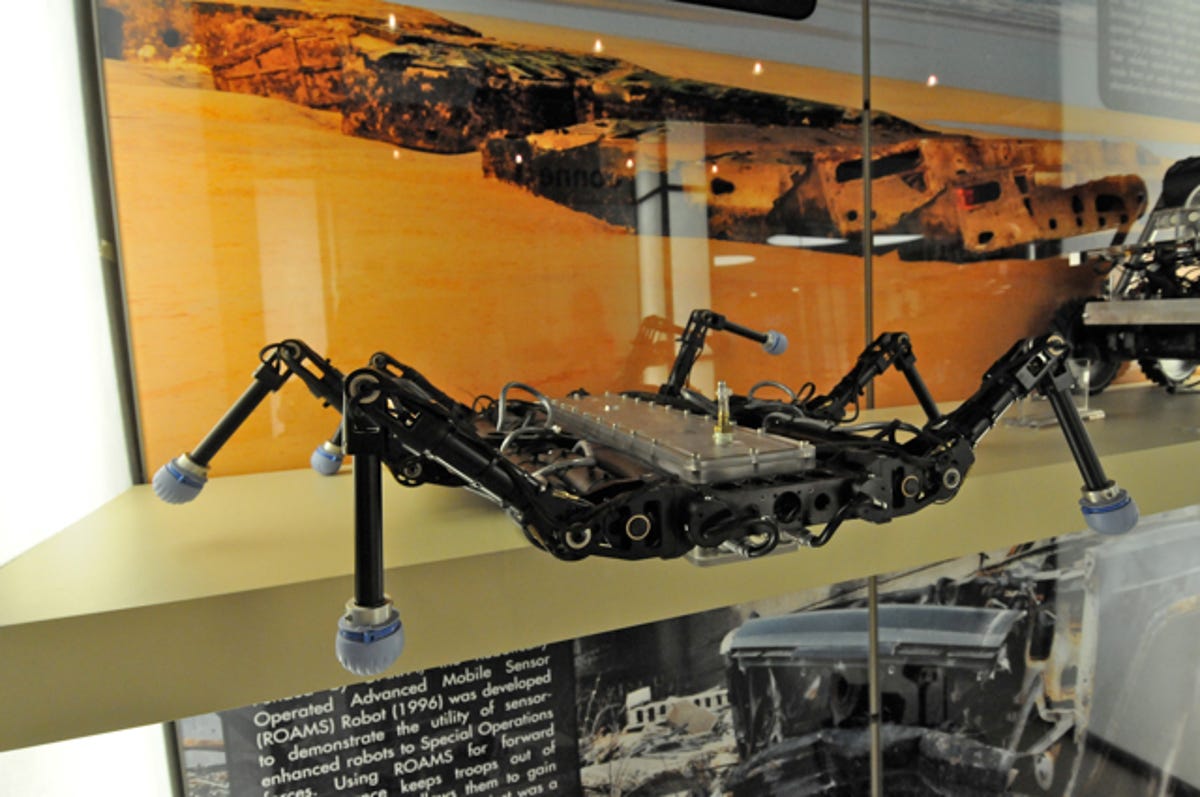
Ariel
This is Ariel, a prototype from 1996. Designed to take mines and other obstacles out of shallow water, it allowed its operator to remain far away. Its design was based on crabs, and the idea is that even if it loses a limb to, say, an explosion, it can continue on. In addition, it can clamber over difficult terrain and even walk upside down if it gets flipped over.
By deploying several of these, it was possible to located and remove mines in surf zones.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

PackBot with its arm extended
This is a PackBot, iRobot's signature military robot. Designed to do search and rescue or to locate and remove explosives, this device can climb, right itself if knocked over, and has a range of about 800 meters from its operator. The PackBot was first made in 2000 and has been in the field with both military and civil defense forces around the world.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Scooby Doo
This is Scooby Doo, a PackBot that didn't make it out of combat unscathed. After missions in which it successfully removed 17 improved explosive devices (IEDs), one piece of unexploded ordnance and one car bomb, it finally fell victim to an IED.
But the military unit that had worked with it--and named it Scooby Doo--felt strongly connected to it that they collected it after it was hit and sent it back to iRobot, where it is on display in the company's lobby.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Stair climber
A PackBot climbing stairs during a demonstration at iRobot headquarters in Bedford, Mass. The device has little trouble navigating stairs if controlled properly by its operator.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

SUGV tries to climb
Looking a bit like an excited dog, this small unmanned ground vehicle (SUVG) tries to mount a large wooden platform during a demonstration. The device is equipped with flippers, a fully articulating arm and heavy-tread tracks, all so that it has the maximum opportunity to climb when necessary.
Although pricing depends on how it is configured, an SUGV can easily run $100,000, mainly because of how rugged it is and because of its communications systems.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

SUGV heads down
After climbing up these stairs, the SUGV now navigates them as it heads down.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Landroid
Part of the next generation of iRobot military robots, this so-called Landroid is a very small device equipped with small flippers, a camera, downward sensors, accelerometers, wireless communications, yaw sensors, and more. Controlled by an operator using a graphical user interface on an iPhone or some other similar device, it is meant to do many of the same tasks as the PackBot or the SUGV, but in a much smaller package.
This is a prototype, and has not yet been productized yet, but it has been in the works for several years.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Another Landroid, this is a much newer prototype that was commissioned by DARPA, the Defense Advanced Research Projects Agency. It features an autonomous communications network, and by working in a mobile communications relay node together with several other similar devices, is designed to help keep soldiers tethered to a communications network, even if they're inside buildings or other difficult areas.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.
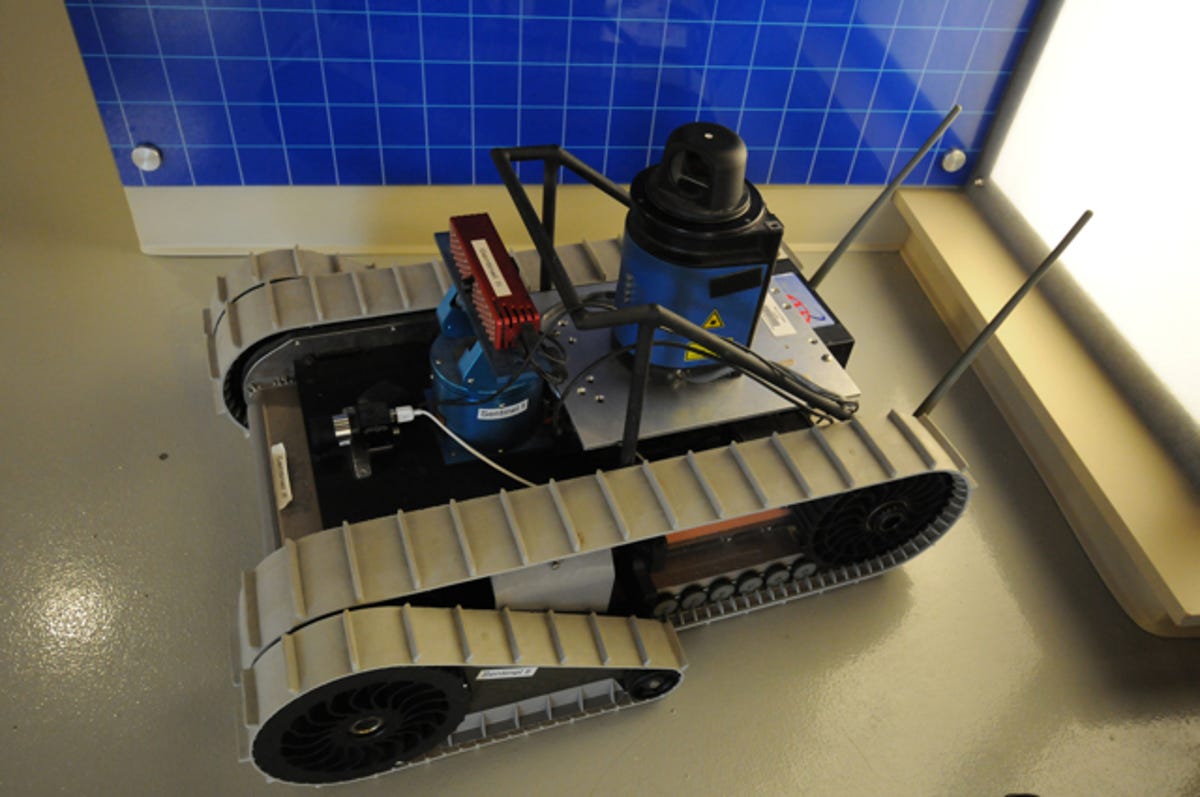
PackBot with LIDAR
This is a PackBot that has been outfitted with a series of sensors including LIDAR (light detection and ranging) and Flash LIDAR, so that it can autonomously create 2D and 3D maps of the terrain it is traversing.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Testing
Not content with the financial and critical response of its Roomba vacuum cleaners, iRobot continually runs them through testing scenarios. This room includes two large racks on which engineers test Roombas for thousands of hours on a range of situations, including heavy dirt, thick rugs and pet fur.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Close-up
A close-up of the Roomba test racks.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

RGator
This is R-Gator, a 2004 design collaboration between iRobot and John Deere. Combining the technologies of iRobot's PackBot and John Deere's M-Gator, this robot includes controls, obstacle detection and navigation equipment from both companies.
The R-Gator could be driven by a human, could be controlled remotely, or could drive autonomously. It includes sensors that allow it to detect obstacles.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Seaglider
This is Seaglider, iRobot's unmanned underwater vehicle. It is designed to take on marine missions for researchers and oceanographers, as well as military planners.
Three of these of currently deployed in the Gulf of Mexico, helping scientists with the BP Oil Spill.
This Seaglider, from 2000, can do deep dives on missions lasting months and traversing thousands of miles. Its technology was originally designed by researchers at the University of Washington, and it can measure salinity, temperature, and other ocean elements, sending all the data back using global satellite telemetry.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Urbie
This is Urbie, the Urban Robot. From 1998, it was built at DARPA's request for a "rugged, reliable, man-packable robot that could climb stairs," according to iRobot. That means that Urbie could be carried around by a solider in the field. It was field-tested in New York City after the terrorist attacks of September 11, 2001.
PackBot is based on the Urbie design.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.
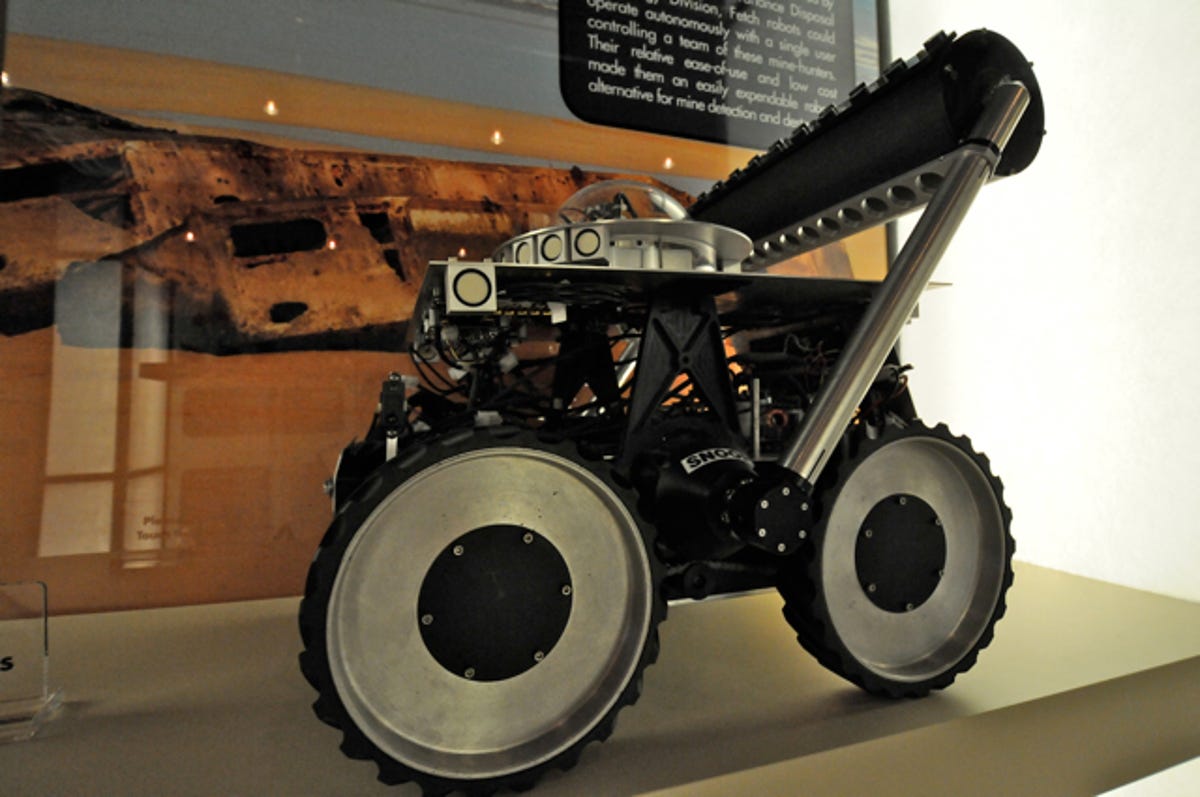
Fetch
This is Fetch, from 1997. It was designed to find and get rid of mines and was originally sponsored by the U.S. Naval Explosive Ordnance Disposal Technology Division. They could operate autonomously, and a single human could control a whole team of Fetches. They were low-cost and were considered essentially expendable.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Swarm robot
This is one element of iRobot's 1999 Swarm robot system. It was based on the behavior of insects and was the company's first experiment with decentralized networked robotic intelligence. The project was funded by DARPA, and didn't require a human to independently control each robot in the swarm. Instead, the user could issue a command to one of the robots, and that command would then be shared among the entire swarm.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.

Warrior
This is Warrior, a 300-pound robot that was designed to go just about anywhere and do just about anything. It could traverse nearly any terrain, climb stairs and carry a lot of weight. It was designed to be used in a wide range of environments, including bomb disposal situations, chemical detection, casualty extraction, and more.
Click here to read the related story on iRobot's history and its future. And click here to check out the entire Road Trip 2010 package.
More Galleries

My Favorite Shots From the Galaxy S24 Ultra's Camera
20 Photos
Honor's Magic V2 Foldable Is Lighter Than Samsung's Galaxy S24 Ultra
10 Photos
The Samsung Galaxy S24 and S24 Plus Looks Sweet in Aluminum
23 Photos
Samsung's Galaxy S24 Ultra Now Has a Titanium Design
23 Photos
I Took 600+ Photos With the iPhone 15 Pro and Pro Max. Look at My Favorites
34 Photos
