Wheels. Legs. This robot has both
Robots are evolving faster than humans. Check out a wheeled robot that can also sprout legs and walk on some serious terrain.


Beware! Future robot overlords could have dual-purpose appendages.
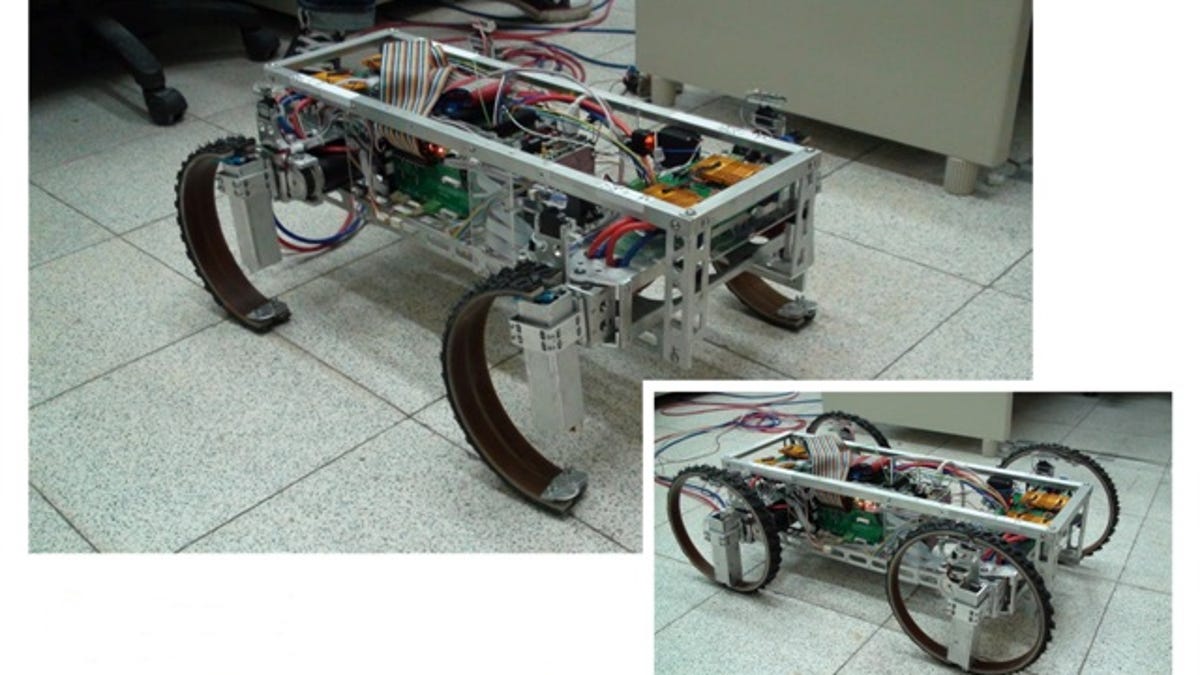
Well, that might be an exaggeration, but this leg-wheel hybrid mobile robot is definitely a front-runner to star in my recurring robot domination nightmares. Meet Quattroped, a remote-controlled walking and wheeling robot that can function in "flat or rough environments," according to the Bio-Inspired Robotic Laboratory team of mechanical engineers at National Taiwan University.

While the wheeled driving mode is keen, what's truly extraordinary is the legged mode. With a simple command, the robot's wheels split in half and fold backward to form C-shaped legs. Despite the clunky movement, Quattroped can surprisingly traverse a variety of environments, ranging from stairs to rough terrain. Sadly, the robot can even dance better than I can.
So how does it work? There's a lot of technology behind the scenes. For example, simply controlling the robot itself required an NI CompactRIO embedded control system (with a 400MHz processor) and a field-programmable gate array. A portion of that system connects to a series of modules that collects data from the robot's sensors and actuators, which gets relayed to a laptop via Wi-Fi.
Related stories
Perhaps most amazing are the variety of sensors onboard the walking wonder. According to the case study, some of the sensors include "a 6-axis inertial measurement unit (IMU) and a 2-axis inclinometer for body state measurement; and three infrared (IR) distance sensors to measure ground clearance.
"Various sensors, such as GPS, vision, and laser ranger, are also used to improve the robot's perception ability." There are also eight motors for driving the robot, six servos for the leg-wheels, and four motors for switching between legs and wheels.
Pei-Chun Lin, Shen-Chiang Chen, Ke Jung Huang, Shuan-Yu Shen, and Cheng-Hsin Li created Quattroped. They don't have a specific purpose for the robot in mind, but hope the elaborate machine will inspire future mobile-robot development "where size, weight, and performance are important factors." Future versions are already in the works with additional sensors for improved perception and better leg movement.