Self-folding origami robot gets up and walks
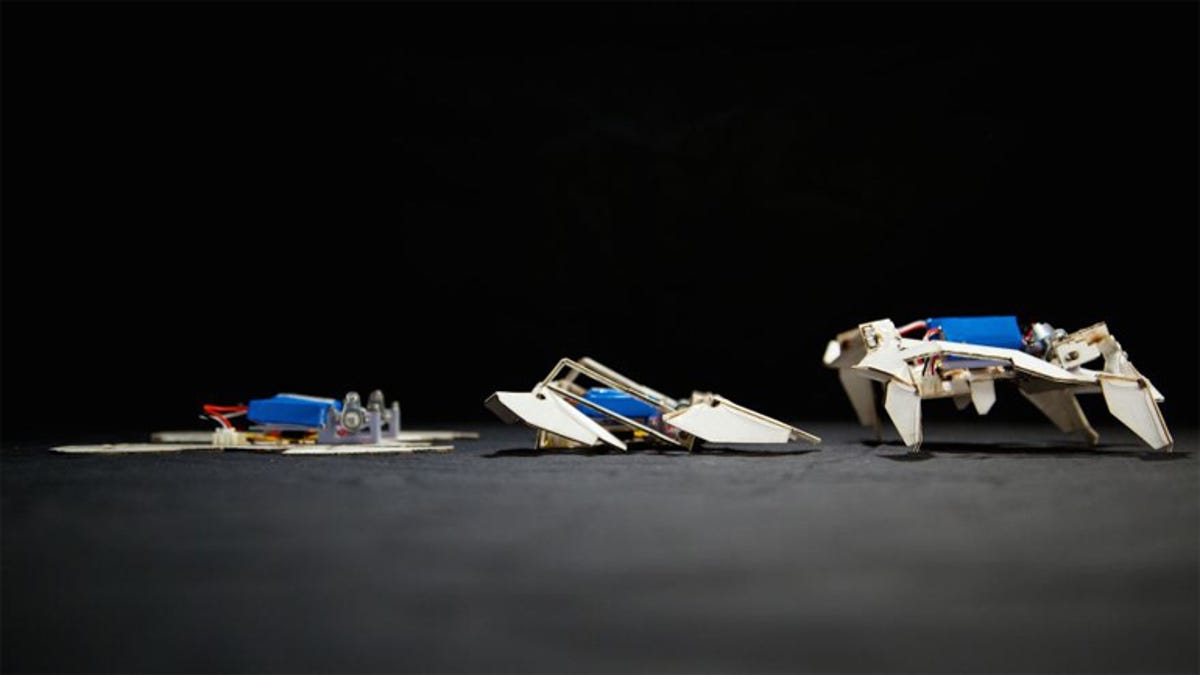
When it is connected to a power source, this flat robot folds itself into a 3D shape and starts walking.


There are several benefits to flat-pack robots: they're fast and cheap to mass manufacture, which means they can be used for applications where their loss won't be a big deal; and they're easy to store and ship. The problems have been organising the components in such a way that means they can fit onto the flat sheet, and designing the robot so that it can actually move.
A new breakthrough by researchers at MIT and both Harvard's Wyss Institute and School of Engineering and Applied Science sees a robot made of little more than paper and Shrinky Dinks that can fold itself into a complex form and walk away without any human aid in as little as four minutes.
Inspired by self-assembly in nature -- such as the way sequences of amino acids fold into complex proteins -- the robot is the latest in a series of origami robots created over the last few years, including a printed, self-folding robotic inchworm, a self-assembling lamp and pop-up robotic bees. This, however, is the first that can build itself and perform a function without human intervention.
The final design is the culmination of around 40 prototypes, and includes the flat sheet, 2 motors, 2 batteries and a microcontroller. The sheet is made of polystyrene and paper, with a single flexible circuit board in the middle, and hinges programmed to fold at specific angles. Each circuit produces heat on command about 10 seconds after power is connected, which triggers the sheet to fold. After four minutes, the polystyrene will have cooled and stiffened, and the robot can walk away at a speed of around 5 centimetres per second.
The robot is also compatible with another growing technology: 3D printing. Obviously the components pose a difficulty -- you can't 3D print a battery -- but you could manufacture the sheets that way. And, perhaps one day, they could be used from anything from mundane household tasks like sweeping to flying into space.
"You would be able to come in, describe what you need in fairly basic terms, and come back an hour later to get your robotic helper," said senior author Rob Wood, a core faculty member at the Wyss Institute and the Charles River Professor of Engineering and Applied Sciences at Harvard's School of Engineering and Applied Sciences. "Imagine a ream of dozens of robotic satellites sandwiched together so that they could be sent up to space and then assemble themselves remotely once they get there -- they could take images, collect data, and more."