Robot learns to walk while damaged
Researchers look to animals for inspiration in developing a groundbreaking algorithm to help broken robots adapt quickly and keep moving.



It's hard not to think of every evil fictional movie robot -- Terminator, anyone? -- when news hits that real-life robots can now walk while injured. After all, it's our worst nightmare -- robots that never stop getting closer and closer even when we shoot them and damage their limbs. However, if we put our sci-fi fears aside, the positive potential for relentless robots that fix themselves is endless.
Robotic helpers for the elderly, rescue robots, and robots sent into space for exploration could all benefit from adapting and self-repair when humans aren't around to fix them.
Researcher Antoine Cully and Assistant Professor Jean-Baptiste Mouret from the Sorbonne University in Paris, and University of Wyoming Assistant Professor Jeff Clune developed an algorithm, inspired by actions and reactions by injured animals, that helps robots regain walking ability quickly after being damaged.
According to their paper, "Robots that can adapt like natural animals (PDF)" their intelligent trial and error algorithm "allows robots to adapt to damage in less than two minutes, thanks to intuitions that they develop before their mission and experiments that they conduct to validate or invalidate them after damage. The result is a creative process that adapts to a variety of injuries, including damaged, broken, and missing legs. This new technique will enable more robust, effective, autonomous robots and suggests principles that animals may use to adapt to injury."
This supplementary video demonstrates their Intelligent Trial and Error Algorithm in action for two different damage possibilities: a leg that lost power and a broken leg on a hexapod robot.
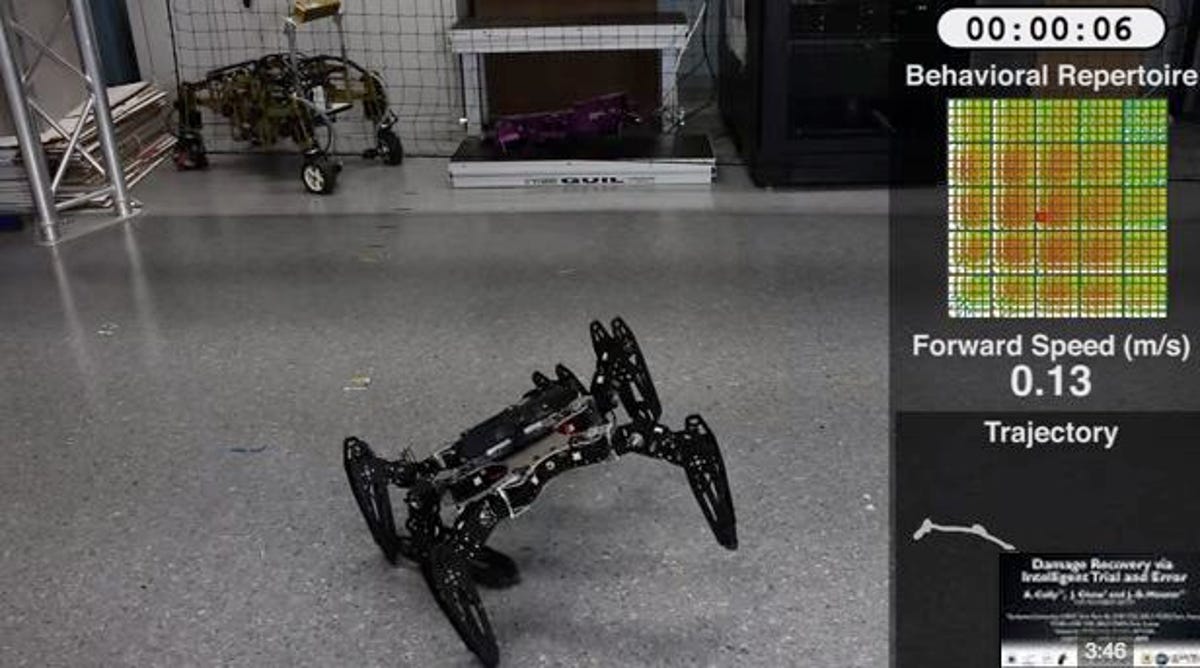
"Initially, when the robot is undamaged, a hand-designed, classic tripod gait, performs well," according to the video description. "Once damage occurs, however, this reference gait no longer works. The Intelligent Trial and Error Algorithm is initiated and quickly finds fast, compensatory behaviors for both damage conditions."
Their algorithm enables the impaired robot to test out different reactions from a stockpile of possible responses to an injury. The behavioral repertoire currently contains around 13,000 different gaits.
"Like animals, our robot does not have a predefined strategy for how to cope with each of a set of possible damages: in the face of a new injury, it exploits its intuitions about how its body works to experiment with different behaviors to find what works best," their paper stated. "The Intelligent Trial and Error primes the robot for creativity during a motionless period, after which the generated ideas are tested."