Robot construction crew works autonomously, is kind of adorable
Engineers and scientists at Harvard have developed a team of robots based on termite behaviour that can build independently, without supervision.


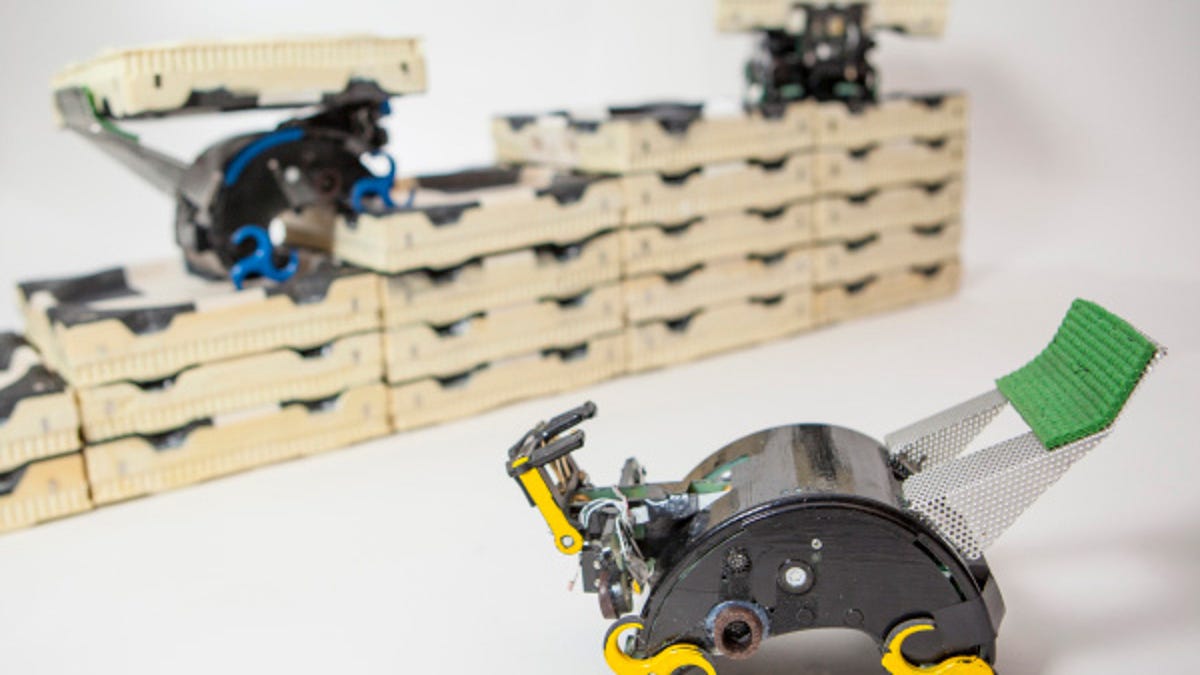
(Credit: Eliza Grinnell, Harvard SEAS)
Engineers and scientists at Harvard have developed a team of robots based on termite behaviour that can build independently, without supervision.
Have you ever seen a termite mound? Those little bugs are amazing engineers, constructing giant (compared to their own size) structures, working relentlessly even though individual insects die.
It was this system of self-organisation that inspired Harvard School of Engineering and Applied Sciences and Wyss Institute for Biologically Inspired Engineering at Harvard University scientists and engineers in building a team of autonomous construction-bots.
Termes, the result of a four-year project, is a collective system of autonomous robots that can build complex, three-dimensional structures such as towers, castles and pyramids without any need for central command or dedicated roles. They can carry bricks, build stairs, climb them to reach higher levels and add bricks to a structure.
"The key inspiration we took from termites is the idea that you can do something really complicated as a group, without a supervisor, and secondly that you can do it without everybody discussing explicitly what's going on, but just by modifying the environment," said principal investigator Radhika Nagpal, Fred Kavli Professor of Computer Science at Harvard SEAS.
The way termites operate is a phenomenon called stigmergy. This means that the termites don't observe each other, but changes in the environment around them — much like the way ants leave trails for each other. The Termes robots operate on the same principal. Each individual robot doesn't know how many other robots are operating, but they are able to gauge changes in the structure and readjust on the fly accordingly.
This means that if one robot breaks down, it does not affect the rest of the robots. Engineers simply program the robots with blueprints and leave them alone to perform the work.
The robots at the moment are quite small — about the size of a toy car — but are quite simple, operating on just four simple types of sensors and three actuators. According to the team, they could be easily scaled up or down to suit the needs of the project, and could be deployed in areas where it's difficult for humans to work — the moon, for instance, although that's an extreme example.
"It may be that in the end you want something in between the centralised and the decentralised system — but we've proven the extreme end of the scale: that it could be just like the termites," Nagpal said. "And from the termites' point of view, it's working out great."
A paper on the project, "Designing Collective Behavior in a Termite-Inspired Robot Construction Team", has been published in the 14 February edition of Science.