MIT 'smart sand' and 'robot pebbles' replicate objects
Research effort uses distributed robots that communicate with each other to auto-duplicate shapes by forming an object out of a larger pile of smart sand.


Researchers at MIT have developed a robotic system for duplicating shapes, a potential alternative approach to three-dimensional printing.
The Distributed Robotics Lab at MIT today detailed research aimed at replicating objects by essentially carving them from an unformed pile of "smart sand" or "robot pebbles." The vision is to have these miniature robots automatically create replicas of different sizes with only an original shape to work with.
A key difference from other approaches to replicating objects is that, unlike three-dimensional printing techniques, the smart sand builds by subtracting building blocks from a larger heap, according to MIT.
Each of the pebbles is equipped with a very simply processor and the ability to communicate with pebbles which touch it. Individual robots send messages among themselves to determine the original shape and their relative position to each other. With that information, they can begin to replicate the original shape from the larger pile of devices.
In a paper to be presented next month at a robotics conference, the MIT researchers will describe software algorithms they developed for distributed robots to re-create shapes. The researchers believe this sort of system could be used for rapid prototyping or reproducing broken objects, such as car parts which need replacing.
The algorithms address both two-dimensional and three-dimensional objects. "We've extended this process to three dimensional shapes. We've demonstrated that it runs reliably and robustly with any original shape," said Kyle Gilpin, a Ph.D. candidate at MIT and co-author of the paper.
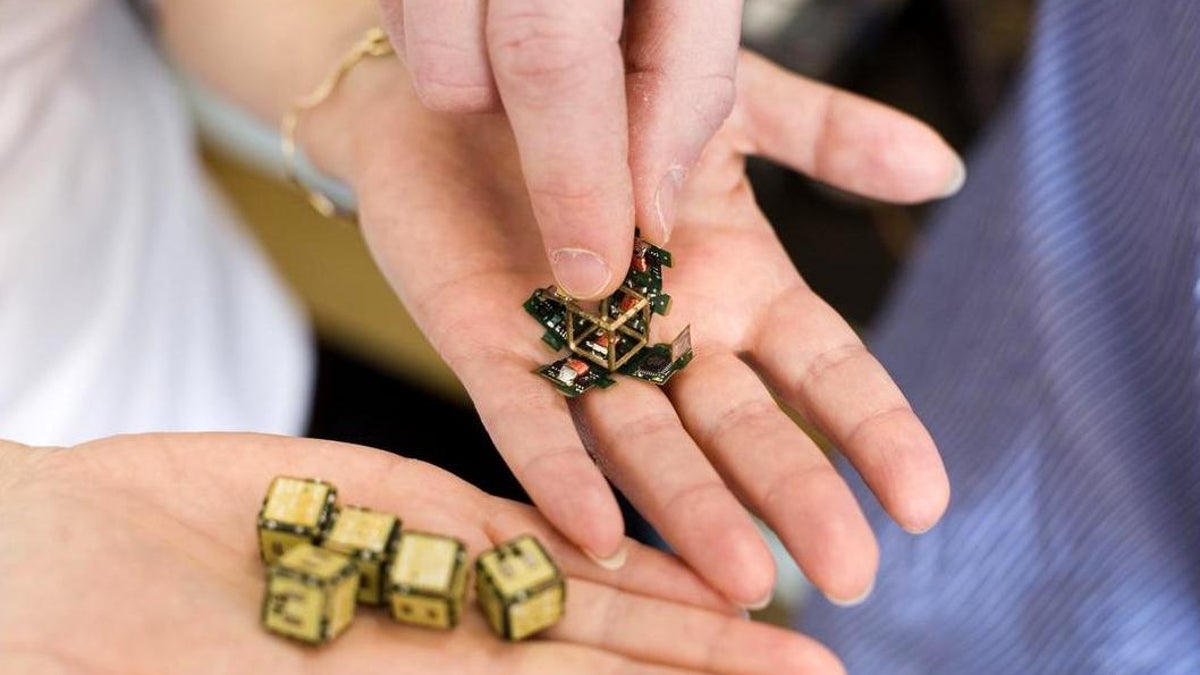
For their three-dimensional research, the group built small cubes, with each side 10 millimeters across, or less than half of an inch. Magnets temporarily activated by electrical current allow them to share information and power.
The size of the individual robots limits the types of objects which could be formed from a whole heap of them. But the researchers expect that the approach can be engineered to work with smaller individual building blocks.