Google Lunar XPrize: Part-Time Scientists visit the moon in Germany
Eighteen teams are in a race to get to the moon, with a $30 million payoff. Team Part-Time Scientists recently explored a simulated lunar surface in Bremen, Germany.


In our last installment covering the Google Lunar XPrize, we got an inside look at Team Astrobotic's testing of their lunar landing algorithms -- the bits that will safely, hopefully, deliver them to the surface of the moon by the end of next year. That's the deadline to collect a $20 million prize for being the first team on the moon.
But, just getting there isn't good enough. Teams must cover at least 500 meters distance once they get there, streaming back high-definition video while doing so. That last bit, the imaging portion of the competition, may sound easy, but it's far more complex than strapping a Dropcam on top of a rover and calling it a day.
The environment presents major challenges. Surface temperatures in craters can drop to just 26 degrees Kelvin -- that's -247 C or -412 F, a stone's throw from absolute zero. At noon, high temperatures soar to 100 C or 212 F, a range that would make packing suitable attire practically impossible. Then of course there's the complete vacuum, the solar radiation, and, perhaps worst of all, the dust.
Yes, dust. It's incredibly fine, yet has the potential to be hugely damaging to equipment. During this Apollo missions, NASA listed the following dust-related complications: "vision obscuration, false instrument readings, dust coating and contamination, loss of traction, clogging of mechanisms, abrasion, thermal control problems, seal failures, and inhalation and irritation."
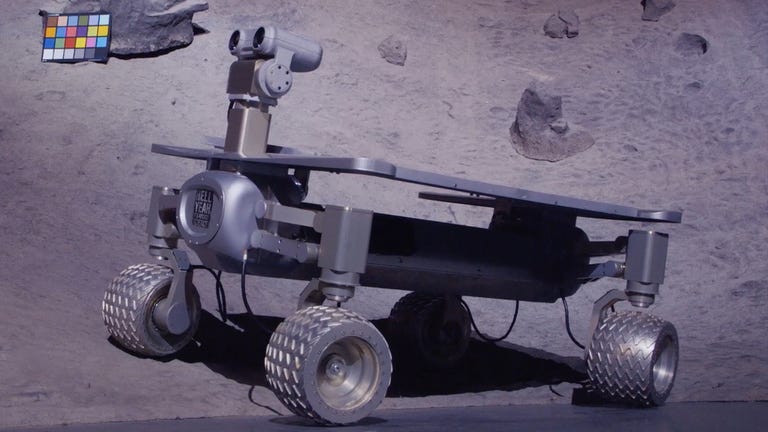
Anybody who has ever changed a lens on an SLR camera knows that dust does no favors there, either. Neither does the incredible contrast ranges experienced on the surface. Thankfully, it's possible to test these scenarios without actually leaving the atmosphere. In Bremen, the German Research Center for Artificial Intelligence features a complete simulated lunar environment with accurate lighting, accurate terrain, and basically everything you need to test your rover and its optics -- all without having to hold your breath.

For Part-Time Scientists, one of the Milestone Prize teams competing for the Google Lunar XPrize, this facility provided an ideal location -- that it was in the back yard of many of the team's members is an added benefit. The team's rover (codenamed "Asimov"), relies on three imaging systems. The two outer cameras provide stereoscopic vision for navigation. The center one, meanwhile, will provide the high-definition color imagery required to meet XPrize guidelines.
There's still a long way to go before launch sometime next year, plenty more questions to answer and verify, but with this test out of the way, those of us on Earth are one step closer to getting a clear, high-definition look at the surface of the moon.