7-foot crab robot may be future of underwater exploration
Crabster CR200, designed to overcome mobility challenges in rough water, is also a frighteningly awesome-looking robot.



Move over, BigDog. DARPA's canine-like quadruped has a new animal kingdom automaton to contend with: the Crabster, a six-legged underwater robot that's sure to cause at least a few nightmares. So if you happen to suffer from kabourophobia -- yes, there's a fear of crabs -- turn back now.
Designed at the Korean Institute of Ocean Science and Technology (KIOST) with help from five South Korean universities, the Crabster CR200 as its officially known was aimed at overcoming the challenges posed by strong tidal currents in shallow waters. Propellor-equipped ROVs and automatous underwater vehicles are adept at swift movements and deep diving, but the technology doesn't bode well in rough conditions. Current tidal strengths of 1.5 meters per second are enough to rip the scuba mask off a human explorer, explains Jason Falconer for IEEE Spectrum.
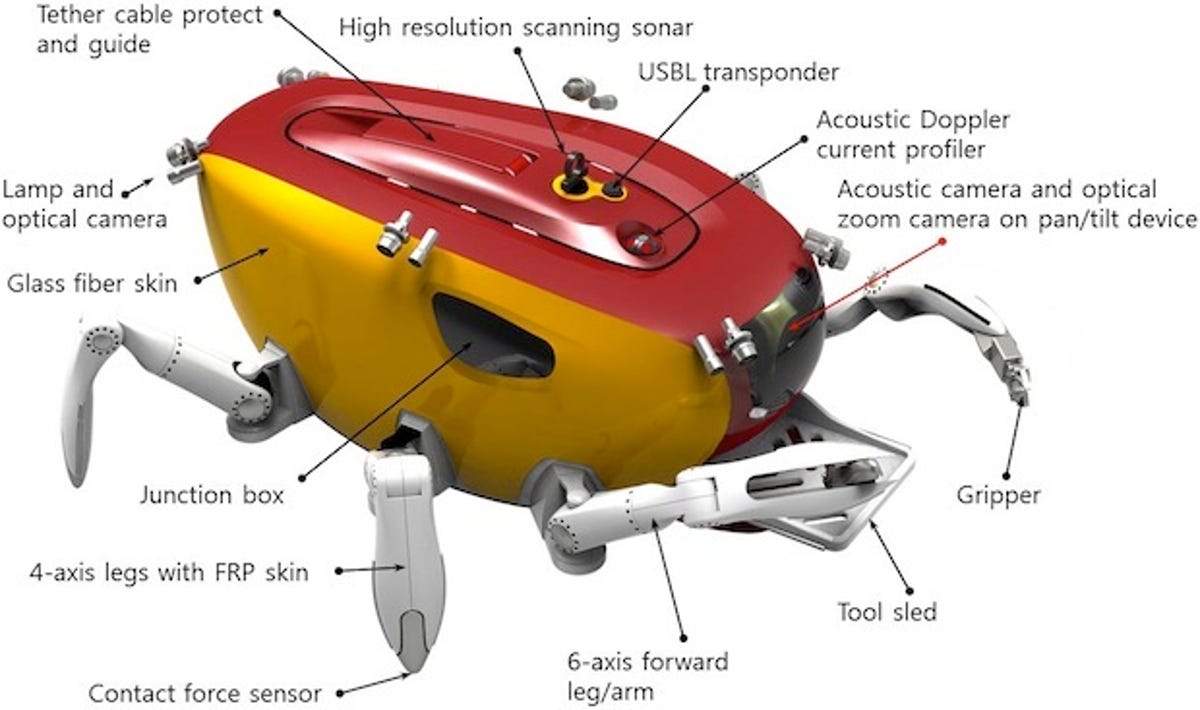
That's why the KIOST ditched fins with propulsion for a more crustacean approach that allows the robot to walk on the sea floor via six legs interconnected with 30 joints. The resulting structure will kick up less obtrusive debris than standard propellers.
Because a tethered external source powers the Crabster, it can stay underwater for days at a time, collecting data using sonar scans and using its two front legs to collect and store objects. The robot's outer shell was designed to withstand strong currents, like those that surround submerged ships that remain ripe for exploration.
Transporting the 1,322-pound Crabster is easy enough using shipping containers and a crane that lowers it to the sea floor, but operating it requires four individuals to simultaneously monitor it every step of the way.
The pilot must manage the movements, while a co-pilot takes care of the front legs, as well as the lights and cameras. A third person must plan movements and keep track of overall position, while the fourth member deals with the sensor equipment. All Crabster operations take place on site. A remote station moves with the robot in the shipping container.
The Crabster is still in the testing phase. After the research team, led by Bong-Huan Jun of KIOST, experimented on land to ensure the robot was watertight and its systems were fully functional, the Crabster took its first successful dive at KIOST's South Sea Research Institute in Geoje City, South Korea. The test dive gathered results on the Crabster's real-time capabilities and presented points of potential improvement. The team hopes to take it on its first full-blown exploration mission next year, with sights set on an unexplored, submerged ship enveloped in aggressive waters.